- 投稿日:2019-04-05T13:29:29+09:00
CPU, GPU, Parallel GPUの速度評価with mnist(MLP), cifar-10(LeNet5), sine wave(LSTM)
この記事の目的
Chainerを使って、自分のパソコンのCPU、GPUの性能を評価してみる。
+プログラミング練習何をするのか
目的通りだが、
- cpu
- gpu
- gpu 2つで
の3種類を使って、次のデータ(モデル)を使って、速度評価をします。
- mnist(MLP) → 全結合NN
- cifar10(LeNet5) → CNN
- sine wave(LSTM) → RNN
みたいな感じでやっていきます。
自分の開発環境
Software
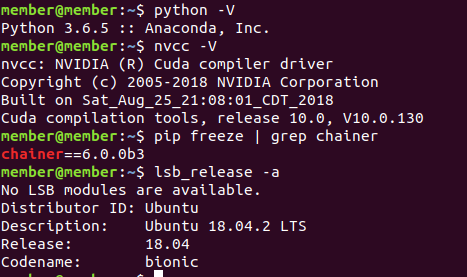
OSはUbuntu使ってます。
Ubuntu, chainer, python, cudaのバージョンは以下のとおりです。
Hardware
CPU -
Intel(R) Core(TM) i7-6850K CPU @ 3.60GHz
6 core, 12 threadsGPU -
gp102 titan x 2つ
https://www.techpowerup.com/gpu-specs/titan-x-pascal.c2863下準備
使うライブラリは以下のとおり:
import chainer import chainer.functions as F import chainer.links as L from chainer import training from chainer.training import extensions from chainer import Chainmnist(MLP)
mnistについて
MNIST(Mixed National Institute of Standards and Technology database)とは、手書き数字画像60,000枚と、テスト画像10,000枚を集めた、画像データセットです。さらに、手書きの数字「0〜9」に正解ラベルが与えられるデータセットでもあり、画像分類問題で人気の高いデータセットです。
https://udemy.benesse.co.jp/ai/mnist.html より
MLPについて
多層パーセプトロン(たそうパーセプトロン、英: Multilayer perceptron、略称: MLP)は、順伝播型(英語版)ニューラルネットワークの一分類である。MLPは少なくとも3つのノードの層からなる。入力ノードを除けば、個々のノードは非線形活性化関数を使用するニューロンである。MLPは学習のために誤差逆伝播法(バックプロパゲーション)と呼ばれる教師あり学習手法を利用する[1][2]。その多層構造と非線形活性化関数が、MLPと線形パーセプトロンを区別している。MLPは線形分離可能ではないデータを識別できる[3]。
https://ja.wikipedia.org/wiki/多層パーセプトロン より
ということで、Chainer docsにあるMLPを参考にして、次のようにモデルを定義しました。
class MLP(chainer.Chain): def __init__(self, n_units, n_out): super(MLP, self).__init__() with self.init_scope(): # Chainerがそれぞれの層を大きさを推測する self.l1 = L.Linear(None, n_units) # n_in -> n_units self.l2 = L.Linear(None, n_units) # n_units -> n_units self.l3 = L.Linear(None, n_out) # n_units -> n_out def forward(self, x): h1 = F.relu(self.l1(x)) h2 = F.relu(self.l2(h1)) return self.l3(h2)結果
学習方法に関するコードはちょっと長く、いちいち出すとゴチャゴチャするので、最後に全部まとめて載せます。間違いがあったらぜひ、指摘してください。
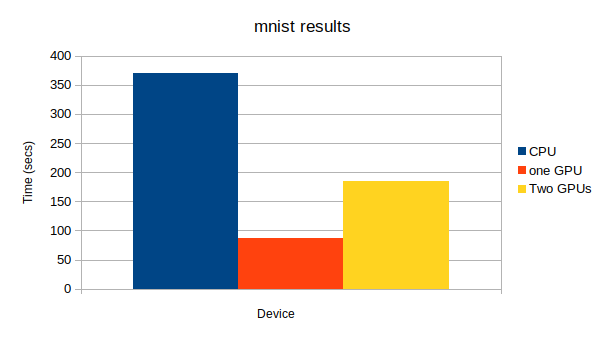
上から、CPU、GPU1つ、GPU2つになっています。GPU: -1, None epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 20 0.000392997 0.112276 1 0.9802 131.866 GPU: 0, None epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 20 0.000861154 0.0953411 1 0.9835 34.7934 GPU: 0, 1 epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 20 0.00679889 0.0958061 1 0.9843 75.3378
cifar-10(LeNet5)
cifar-10について
CIFAR-101)はAlexNetで有名なAlexさんらが構築したもので80 million tiny imagesから
・飛行機、犬など10クラス
・学習用データ5万枚
・評価用データ1万枚
を抽出したデータセットです。
http://starpentagon.net/analytics/cifar-10_dataset/ より
LeNet5について
LeNet(5)とは1990年代に作成された一番初めにConvolutional Neural Netowrkの基礎にあたるものを提案し使用したネットワーク.MNISTにおいて当時から高い精度を出していた.
http://www.thothchildren.com/chapter/59bf6f7ee319b7394d662311 よりということで、Chainer docsにあるLeNet5を参考にして、次のようにモデルを定義しました。
Mnistに使うって書いてあるのになんで、cifar-10かというと、ただただ気分です。あとでResNetも使って実装しますから、怒らないでください笑class LeNet5(Chain): def __init__(self): super(LeNet5, self).__init__() with self.init_scope(): self.conv1 = L.Convolution2D( in_channels=None, out_channels=6, ksize=5, stride=1) self.conv2 = L.Convolution2D( in_channels=6, out_channels=16, ksize=5, stride=1) self.conv3 = L.Convolution2D( in_channels=16, out_channels=120, ksize=4, stride=1) self.fc4 = L.Linear(None, 84) self.fc5 = L.Linear(84, 10) def forward(self, x): h = F.sigmoid(self.conv1(x)) h = F.max_pooling_2d(h, 2, 2) h = F.sigmoid(self.conv2(h)) h = F.max_pooling_2d(h, 2, 2) h = F.sigmoid(self.conv3(h)) h = F.sigmoid(self.fc4(h)) if chainer.config.train: return self.fc5(h) return F.softmax(self.fc5(h))結果
学習方法に関するコードはちょっと長く、いちいち出すとゴチャゴチャするので、最後に全部まとめて載せます。間違いがあったらぜひ、指摘してください。
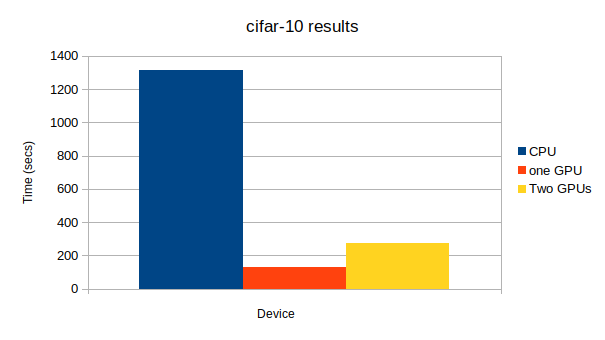
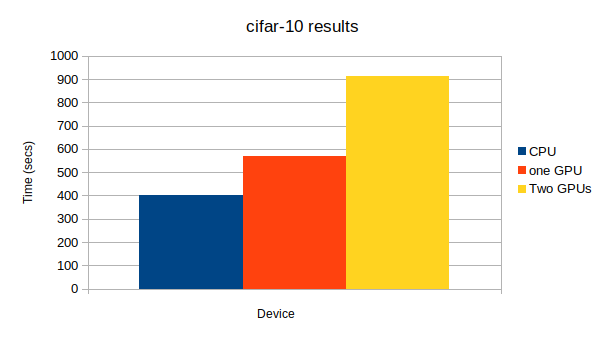
上から、CPU、GPU1つ、GPU2つになっています。GPU: -1, None # Minibatch-size: 100 # epoch: 50 epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 50 1.00791 1.92314 0.64 0.6087 1313.48 GPU: 0, None # Minibatch-size: 100 # epoch: 50 epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 50 1.26838 1.9345 0.62 0.6039 127.483 GPU: 0, 1 # Minibatch-size: 100 # epoch: 50 epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 50 1.02486 1.94677 0.6 0.5919 273.38
Sine Wave(LSTM)
ここのパートは以前書いた記事https://qiita.com/AtomJamesScott/items/41c4a3bd85a851f02770 の実装結果を使っていきたいと思います。
Sine Waveについて
サイン波です。
LSTMについて
LSTMとは時系列のデータを扱うRNN(再起的ニューラルネットワーク)の一種で、普通のRNNだと起こる勾配が爆発・消失する問題がないので、よく使われている。
class LSTM(Chain): n_input = 1 n_output = 1 n_units = 5 def __init__(self): super(MLP, self).__init__( l1 = L.Linear(self.n_input, self.n_units), l2 = L.LSTM(self.n_units, self.n_units), l3 = L.Linear(self.n_units, self.n_output), ) def reset_state(self): self.l2.reset_state() def __call__(self, x): h1 = self.l1(x) h2 = self.l2(h1) return self.l3(h2)結果
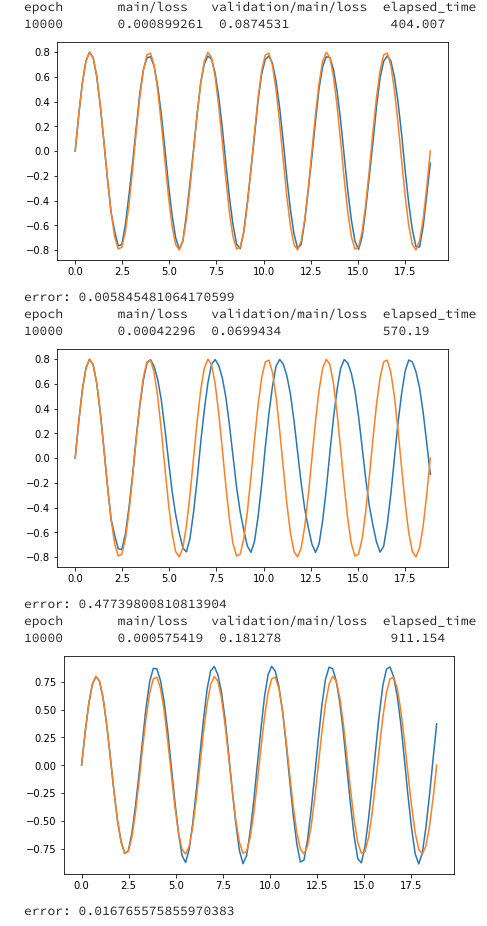
学習方法に関するコードはちょっと長く、いちいち出すとゴチャゴチャするので、最後に全部まとめて載せます。間違いがあったらぜひ、指摘してください。特にLSTMの学習はBPTTがある関係でややこしく、ミスってる可能性あります。上から、CPU、GPU1つ、GPU2つになっています。
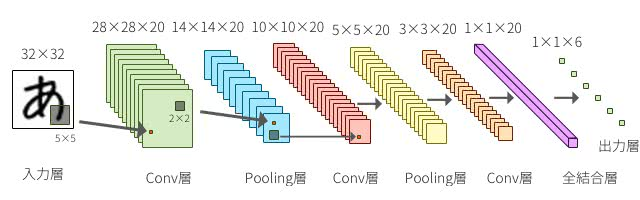
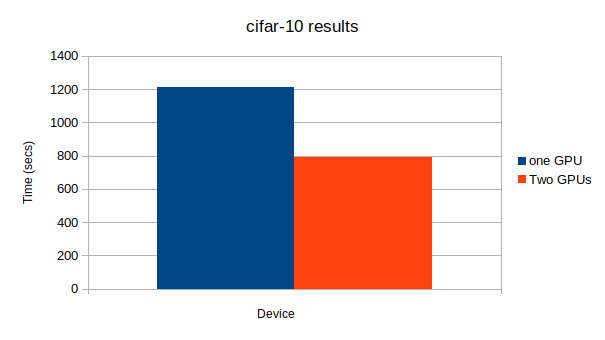
補足 cifar-10(Resnet152)
Resnet152について
ResNetは、Microsoft Research(現Facebook AI Research)のKaiming He氏が2015年に考案したニューラルネットワークのモデルである。
CNNにおいて層を深くすることは重要な役割を果たす。層を重ねるごとに、より高度で複雑な特徴を抽出していると考えられているからだ。
Convolution層はフィルタを持ち、Pooling層と組み合わせて何らかの特徴を検出する役割を持っている。低・中・高レベルの特徴を多層形式で自然に統合し、認識レベルを強化することができる。
https://deepage.net/deep_learning/2016/11/30/resnet.html よりモデルに関してこちらを参考にしてください。
https://docs.chainer.org/en/stable/examples/cnn.html
結果GPU: 0, None # Minibatch-size: 2048 # epoch: 50 epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 50 0.0734697 6.44621 0.975586 0.474124 1211.89 GPU: 0, 1 # Minibatch-size: 2048 # epoch: 50 epoch main/loss validation/main/loss main/accuracy validation/main/accuracy elapsed_time 50 0.0985431 6.45934 0.962891 0.459237 789.439
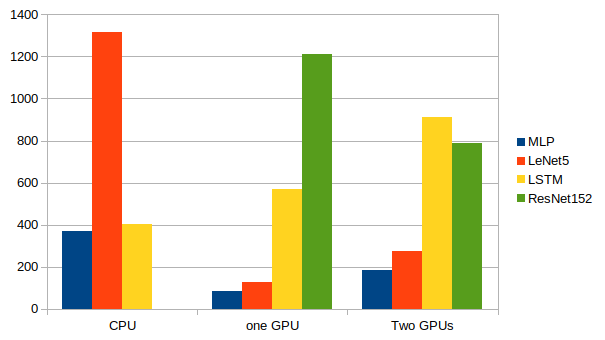
結論
複数のGPUを有効活用するのは難しいことが分かりました。
調べたところ
- Use a very small network. 小さいネットワークを使う
- Use very small batch size. 小さいバッチサイズを使う
- Create overhead for updating parameters across multiple GPUs. パラメータ更新のオーバーヘッドを大きくする
という3つのことをやってしまうと、複数のGPUを有効活用できないそうだ。
この記事でも最後に使ったResNet152が一番大きなネットワークになっており、唯一複数GPUを使ったほうが計算が早く終了した。
(CPUで実験をしなかったのはLeNet5の例から分かるとおり、conv netでCPUを使うとすごく時間かかるからです。)



- 投稿日:2019-04-05T01:30:24+09:00
Autoencoder を使った異常検知
はじめに
Autoencoder での異常検知について話す機会があったので、せっかくなので記事にもしておきます。
※注意
雰囲気を示すために例として celebA データセットを使った結果を出していますが、正常データ内に広いバリエーションがある場合だと今回紹介する手段では難しいです。記事内の結果はチェリーピックしたやつだと思ってください。異常の検知
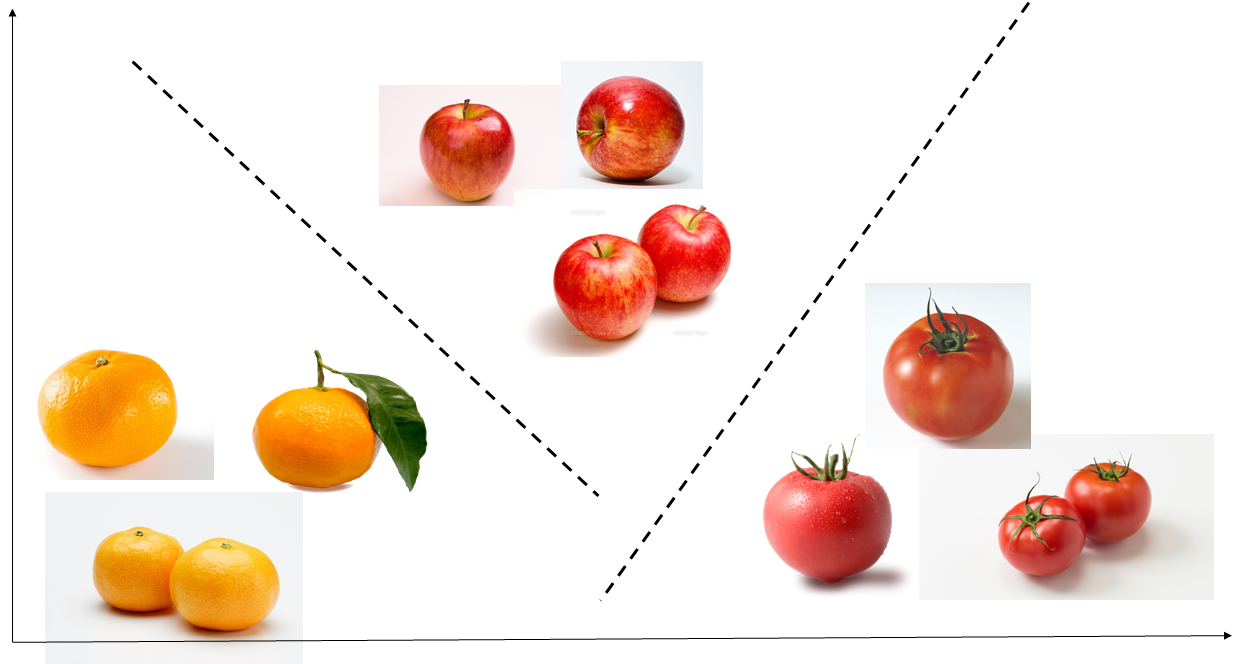
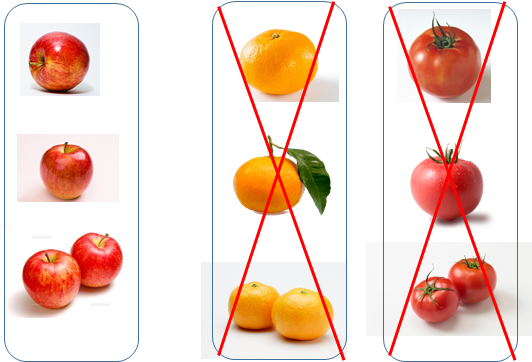
ここでの異常検知としては外観検査のようなものを想定します。リンゴの画像を正常データ、それ以外のミカン、トマトの画像を異常データとする場合、リンゴの画像をミカンやトマトの画像と区別するような問題を考えます。
異常データが入手可能な場合
こんな感じでリンゴ、ミカン、トマトのデータがそれぞれ沢山手に入る場合、それらを学習用データとして使えば (原理的には) 各クラス間の決定境界を決めることができるので、リンゴとそれ以外のものを判別できます。
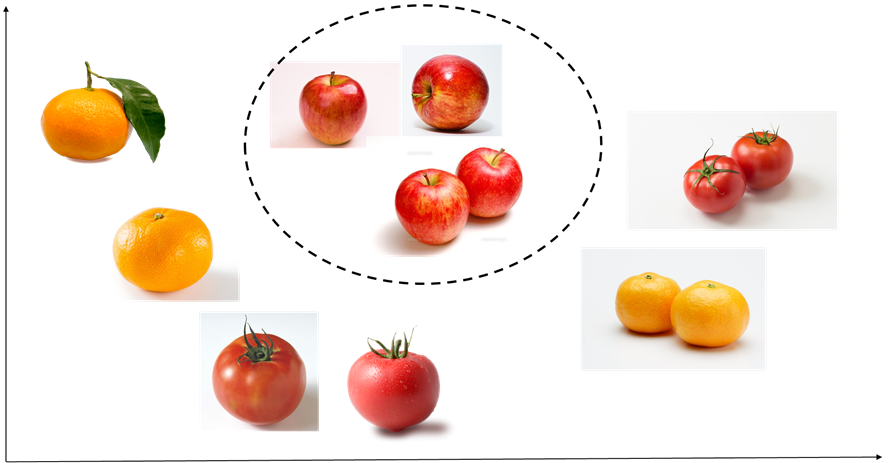
異常データが入手できない場合
リンゴのデータは入手できるもののミカンやトマトのデータは手に入らないといった場合があります。例えば工業製品の欠陥検査などでは、正常データは多数手に入るものの異常データはほとんど手に入らない (そんなにぽんぽん欠陥品が出るようでは困る) というケースは多いです。
その場合でも、何らかの方法で正常データの分布を掴むことができればそこから外れたものを異常データとみなすことで正常/異常の判別に使えそうです。
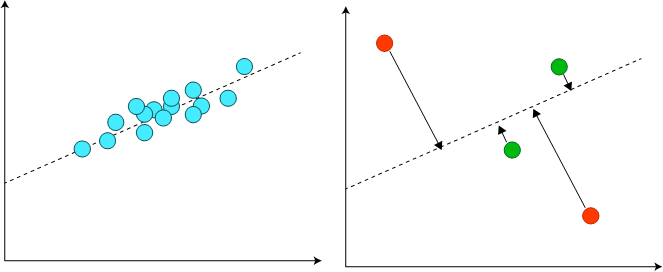
正常データの分布との距離の取り方について、2次元データが実質的に1次元の直線上に分布しているようなケースを考えると下図のようになります。下図左は正常データの分布が1次元の直線上に分布していることを、下図右は判別対象である新しいインスタンスについて正常データ分布から得られた直線との距離を取ることを示しています。
具体的には、正常データについて主成分分析を行って正常データこの距離が近ければ正常、遠ければ異常とすることで異常の判別ができそうです。
高次元のデータではどうすれば?
データの次元が小さければ主成分分析でもしておけばよさそうですが、画像などの高次元なデータの場合はニューラルネットワークに頼りたいです。今回は Autoencoder を使った場合について紹介しますが、GAN や VAE を使う方法もあります。例えば Efficient GAN-Based Anomaly Detection などは GAN を使った異常検知の好例だと思います。
使用したニューラルネットワーク
適当な Convolutional Autoencoder です。損失関数は Mean Squared Error。
使用したデータ
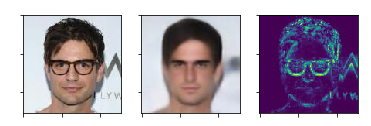
celebA データセットを glasses 項目を参照して眼鏡あり/なしに分割し、眼鏡なしの画像を学習用データとしました。
結果
左から、入力画像、出力画像、入出力差分画像の順に並べています。眼鏡の部分の再構成が上手くできずに差分が大きくなっていることがわかります。髪の毛など、眼鏡以外の場所でも差分の大きい領域は出てきてしまうようです。