- 投稿日:2020-08-05T23:22:37+09:00
Wio Terminal で TinyGo プログラミングを始めよう
このページには、 Wio Terminal + TinyGo 0.14 を使ってマイコンプログラミングを始めるための情報を記載します。
マイコンプログラミングをしたことがある人もない人も、是非試してみてください。
主に Windows 10 で試しながら書きますが、他の OS でもほとんど同じ動きになると思います。TinyGo とは
マイコンや WASM などの Small Places 向けの Go Compiler です。
ここでは Go の文法でマイコン開発ができるもの、という程度の認識でよいです。このページは 2020/08/05 にリリースされた TinyGo 0.14 を対象としています。
Wio Terminal とは
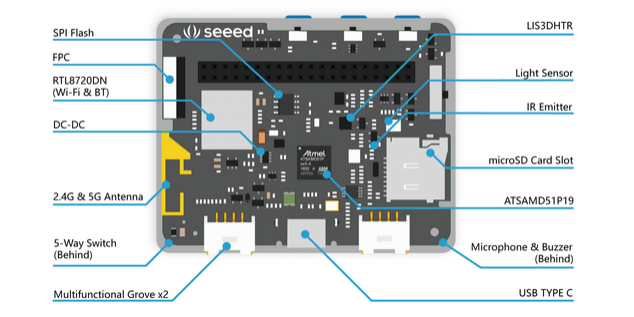
Wio Terminal は Seeed 社のディスプレイ付きの開発ボードです。
320 x 240 のディスプレイ、 WiFi / BLE 搭載、ボタンに加速度センサに MicroSD カードスロットに、と非常に多機能です。マイコンは Microchip 社の ATSAMD51P19 (Arm Cortex-M4 120MHz) が搭載されています。
基本的には Arduino などでの開発が想定されているが、 TinyGo でも 0.14 でサポートされました。
https://www.seeedstudio.com/Wio-Terminal-p-4509.html
https://wiki.seeedstudio.com/Wio-Terminal-Getting-Started/WiFi / BLE 搭載ということで、技適取得済みの Version を買う必要があります。
国内では以下から購入すると良いと思います。
- スイッチサイエンス
- 秋月電子通商
- マルツ
TinyGo のインストール
以下に従ってインストールを実施してください。
0.13.1 までは windows の native 版は日本語環境で動かない問題など色々ありましたが、 0.14 からは native 版で大丈夫です。
docker のほうが良い場合は、 docker 版を使っても問題ありません。
なお、 TinyGo の実行には Go のインストールも必要です。
事前に Go 1.14 あたりをインストールしておいてください。Windows でのインストール例
以下をダウンロードして、
C:\tinygo\bin\tinygo.exeとなるように配置します。
※実際は PATH が通っていればどこでも良いです or PATH が通ってなくても tinygo.exe を実行出来れば良いですhttps://github.com/tinygo-org/tinygo/releases/download/v0.14.0/tinygo0.14.0.windows-amd64.zip
その後 PATH を通します。
$ set PATH=%PATH%;C:\tinygo\bin以下で version が表示されたらインストール成功です。
$ tinygo version tinygo version 0.14.0 windows/amd64 (using go version go1.14.3 and LLVM version 10.0.1)Hello TinyGo
Hello World に相当するプログラムとして、 L チカ (LED を光らせる) を実施してみます。
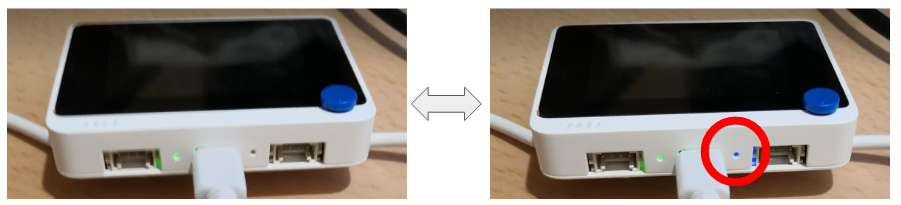
パソコンと Wio Terminal を USB ケーブルで接続して、以下を実行します。$ tinygo flash --target wioterminal --size short github.com/tinygo-org/tinygo/src/examples/blinky1 code data bss | flash ram 7516 8 6344 | 7524 6352分かりにくいですが、以下の青 LED が 0.5 秒毎に ON / OFF を繰り返すようになれば成功です。
次に点滅周期を変更してみます。
上記は github.com 上のソースを直接書き込んでいたので変更ができません。以下からソースコードを取得して適当な場所に保存します。
https://github.com/tinygo-org/tinygo/blob/release/src/examples/blinky1/blinky1.gopackage main // This is the most minimal blinky example and should run almost everywhere. import ( "machine" "time" ) func main() { led := machine.LED led.Configure(machine.PinConfig{Mode: machine.PinOutput}) for { led.Low() time.Sleep(time.Millisecond * 500) led.High() time.Sleep(time.Millisecond * 500) } }500 ms 待つところを 1000 ms 等に書き換えてみて、ビルドおよび書き換えができていることを確認してください。
tinygo flashは、おおよそgo buildやgo getのイメージで package を指定できます。
以下のように現在のフォルダ/ディレクトリに blinky1.go しかない場合は、tinygo flash .のようにして flash することができます。$ dir /b blinky1.go $ tinygo flash --target wioterminal --size short . code data bss | flash ram 7996 8 6344 | 8004 6352ここまでで、最低限の TinyGo 入門ができました。
以降では、ディスプレイなどを使うサンプルを書いていきます。Examples
TinyGo の参考になるソースコードは、以下にあります。
マイコン毎にボタンの有無等色々な条件があるため、そのままでは動かないものもあります。
このページでは、 Wio Terminal で動くように修正したサンプルを徐々に公開していく予定です。Wio Terminal の周辺デバイスを使用する (準備)
Wio Terminal には以下の周辺デバイスがパッケージされています。
先に以下を go get しておいてください。
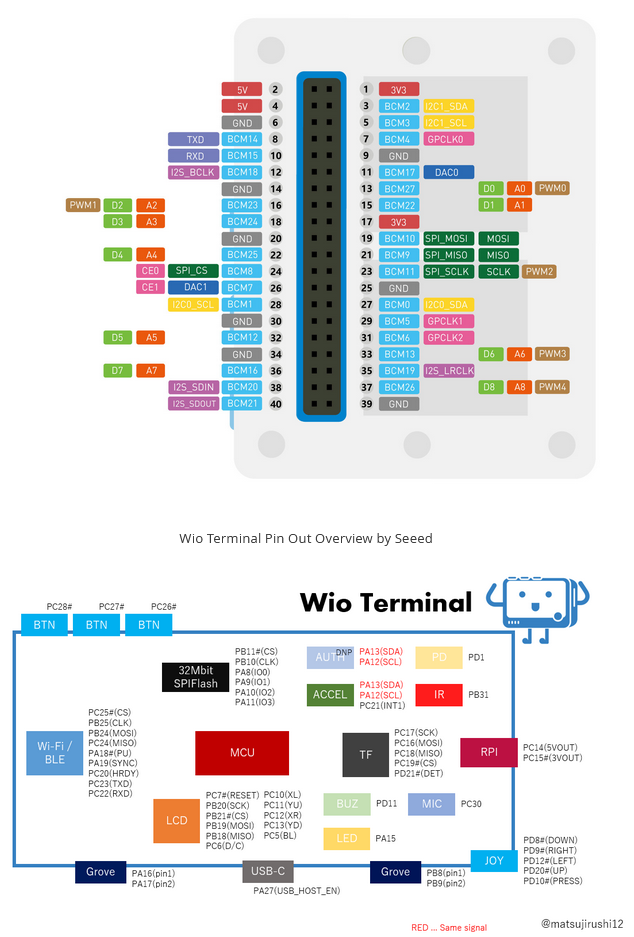
tinygo.org/x/driversの場所にgithub.com/tinygo-org/driversというような形で go get されます。$ go get tinygo.org/x/drivers $ go get tinygo.org/x/tinyfont $ go get tinygo.org/x/tinydraw周辺デバイスを使うためにはピンなどの設定名を知る必要があります。
Arduino などとほぼ同じ名前となっていますが、詳細は以下のあたりに記載されています。
- https://github.com/tinygo-org/tinygo/blob/release/src/machine/board_wioterminal.go
- https://github.com/tinygo-org/tinygo/blob/release/src/machine/board_wioterminal_baremetal.go
※画像は オフィシャルページ にあるもの
Wio Terminal の周辺デバイスを使用する
以下にてとりあえず使い始めることができます。
Wio Terminal で動かすためには一部変更が必要なものがあります。
このあたりは、徐々に説明を追加していきます。
- 4MB External Flash
- RTL8720DN : WiFi / BLE
- 2020/08/05 時点で作成中 (まだ正常に動かないレベル)
- https://github.com/sago35/drivers/tree/rtl8720dn/rtl8720dn
- https://github.com/sago35/drivers/tree/rtl8720dn/examples/rtl8720dn/webclient
- USB OTG
- tinygo 0.14 時点では未対応
- ILI9341 : 320 x 240 LCD
- LIS3DH : 加速度センサ
- I2C1 / lis3dh.Address0
- tinygo.org/x/drivers/lis3dh
- tinygo.org/x/drivers/examples/lis3dh
- Microphone
- 以下の名前のピンを AD 入力ピンとして設定する
- WIO_MIC = PC30
- tinygo.org/x/tinygo/src/examples/adc
- Speaker / buzzer
- 以下の名前のピンを出力ピンとして設定してから buzzer に渡す
- WIO_BUZZER = PD11
- tinygo.org/x/drivers/buzzer
- tinygo.org/x/drivers/examples/buzzer
- microSD Card
- 2020/08/05 時点で作成中 (最低限動くが、ファイルシステム FAT32 は read のみ)
- https://github.com/tinygo-org/drivers/pull/167
- Light Sensor
- 以下の名前のピンを AD 入力ピンとして設定する
- WIO_LIGHT = PD01
- tinygo.org/x/tinygo/src/examples/adc
- 5-Way Switch and 3 x buttons
- 以下の名前のピンを入力として設定する
- WIO_5S_UP = PD20
- WIO_5S_LEFT = PD12
- WIO_5S_RIGHT = PD09
- WIO_5S_DOWN = PD08
- WIO_5S_PRESS = PD10
- WIO_KEY_A = PC26
- WIO_KEY_B = PC27
- WIO_KEY_C = PC28
- tinygo.org/x/tinygo/src/examples/button
- LED
- 以下の名前のピンを出力として設定する
- LED = A15
- tinygo.org/x/tinygo/src/examples/blinky1
- Infrared Emmitter (IR 940nm)
- 以下の名前のピンを出力として設定する
- WIO_IR = PB31
- tinygo.org/x/tinygo/src/examples/blinky1
Examples
wioterminal/sample
#TinyGo 0.14 supports #WioTerminal, so I created an example. This is an exanple of how to use many buttons and sensors.https://t.co/XsypuI0yan pic.twitter.com/Nx4liThbW4
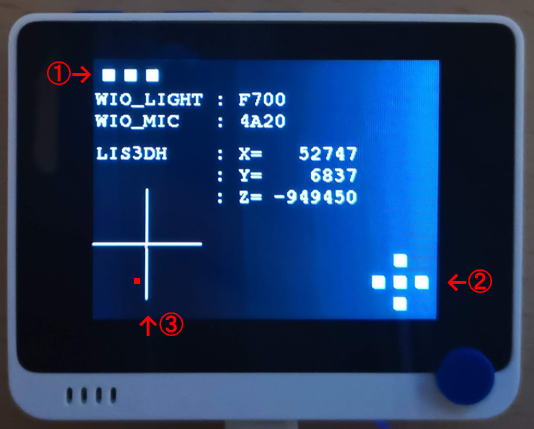
— takasago (WFH) (@sago35tk) August 7, 2020ボタン類と LED と LIS3DH と MIC と BUZZER と ILI9341 を使った簡単な Demo を作りました。
- ① は上部のボタン A ~ C に対応して、押下で赤く光ります
- ② は十字キーに対応して赤く光ります
- 十字キー押下で赤く光りつつ音を鳴らします
- ③ は LIS3DH でとった X および Y 軸の傾きを赤で表示します
- 上図のようになっていると手前に大きく、左に少し傾いていることを表します
- WIO_LIGHT (背面) から読み取った AD 値を表示
- WIO_MIC (左下付近) から読み取った AD 値を表示
- LIS3DH から読み取った X / Y / Z の値を表示
ソースコードは以下です。
uf2 ファイルも置いているので、 TinyGo の環境が無くても試せます。注) tinyfont は dev branch のものを使ってください
リンク

- 投稿日:2020-08-05T15:51:10+09:00
GoでHello vinaka!(World!)を出す
Goに触れてみたかったので、学習をはじめてみました。
ソフトウェアのインストール
Go公式でダウンロード
環境に合わせて、ダウンロード
手順に沿ってインストール
インストールをクリック
少し時間かかります。
ゴミ箱に入れます。
Hello vinaka!(World!)の出力(失敗)
main.gopackage main import ( "fmt" ) func main() { fmt.Println("Hello vinaka!") }% go build main.go zsh: command not found: go"Hello vinaka!"が表示されない。
GoをHomebrew のコマンドでインストール
% brew install go %go version go version go1.14.6 darwin/amd64Hello vinaka!(World!)の出力(成功)
% go run main.go Hello vinaka!参考

- 投稿日:2020-08-05T02:32:30+09:00
Goのhttp.Requestのキャンセルの仕組みを理解する
はじめに
Goのhttp.Request構造体の
ctxはdocによると、以下の場合にcancelされます。For outgoing client requests, the context controls cancellation.
For incoming server requests, the context is canceled when the client's connection closes, the request is canceled (with HTTP/2), or when the ServeHTTP method returns.クライアントがタイムアウトを設定していた場合にもタイムアウト時間経過後にコネクションがcloseされるため、サーバ側実装でcontextを参照することでタイムアウトしたことも気づけることになります。
Request.ctxやその子孫関係にあるcontext(contextは親がキャンセルされると子に伝播されます)をサーバ側で参照することで無駄なリソースの利用を防ぐことができます。
例えば、conn.ExecContext(ctx, ...)にてsqlを実行していた場合、引数にcontextを渡すことで、sqlが実行中であってもクライアントが設定したHTTPのタイムアウトのタイミングで実行中のクエリがキャンセルされ、DBの負荷を抑えることができます。ただ、厳密には実行中のクエリまでキャンセルされるかはdriverの実装次第かと思いますが、著名なドライバでは対応していると思って良さそうです。
postgresの一番著名なドライバである
lib/pqにはソースでいうとこのあたりで実装されているようで、contextのキャンセルをwatchしているgoルーチンを新規に作りキャンセル判定した場合にはキャンセルのリクエストをDBサーバに送っていることがわかります。今回確認したいこと
http.Request.ctxを参照する有用性がわかったところで今回、確認したいのはhttp.Request構造体のctxはいつだれがどのようにキャンセルしているかです。僕らサーバサイドエンジニアの仕事は極論をいうと以下のインターフェースを実装することであるといっていいでしょう。
type Handler interface { ServeHTTP(ResponseWriter, *Request) }ポートをバインドし、Acceptし、適切にヘッダー等を読み込みといったHTTPサーバとして必要な細かい部分はよしなにGoの標準ライブラリが担ってくれるので、僕らはHandlerインターフェースの「リクエストボディを読み込んでレスポンスボディを書き出す」という仕事に集中できます。
逆にいうと
ServeHTTPの実行中の処理はライブラリ側ではなく、アプリ側の実装にのみ存在するので、普通に考えれば、リクエストボディを読みこみおわったとアプリ側が判断し、それ以降コネクションがcloseされないかを監視するgoルーチンをつくる処理を自前で書かないといけないはずです。このあたりの仕組みどうなっているんだ?とおもったのが今回の動機です。
なお、HTTP2やHTTPSは対象外とします(単純にそちらまでソースを読めていないからで同様の仕組みはあるはず)。
httpの実装早速実装を確認していきます。せっかくですのでかなりざっくりと全体像も確認していきます。
ソースにインラインでコメントを書いていきます。元のコードを上書きは一切してませんが見通しをよくしたいためかなりの処理を消してます。
まず、大事な箇所は以下です。
https://github.com/golang/go/blob/f92337422ef2ca27464c198bb3426d2dc4661653/src/net/http/server.go#L2907-L2971for { // lはnet.ListenerでAcceptによりクライアントからのリクエストを待ち受けている // 新しいリクエストがきたらrwがそのコネクションとして返る rw, err := l.Accept() if err != nil { // Temporary Errorの場合は適切にsleepしcontinue } // cはserversideのhttp connectionを表現します // c.rwcはrwを保持します。おそらくrwcはreadwriteconnectionの略でしょう c := srv.newConn(rw) c.setState(c.rwc, StateNew) // before Serve can return go c.serve(connCtx) }かなり簡潔にしたのが上記です。
Acceptにより新しいリクエストを無限loopで待ち受け、コネクションをもとにc.serveに新しいgoルーチンでcallしていることがわかります。アプリを実装する際、当然リクエストごとに実行するgoルーチンは異なりますがそれはここでgoルーチンを起動しているからです。
go c.serve(connCtx)で呼ばれている処理を抜粋すると以下です。
https://github.com/golang/go/blob/f92337422ef2ca27464c198bb3426d2dc4661653/src/net/http/server.go#L1840-L1955// Serve a new connection. func (c *conn) serve(ctx context.Context) { c.remoteAddr = c.rwc.RemoteAddr().String() ctx = context.WithValue(ctx, LocalAddrContextKey, c.rwc.LocalAddr()) defer func() { // deferにてbufferリングしていたwriteをflushしたりリソースを開放します // またc.rwc(Acceptで取得したコネクション)をcloseします c.close() c.setState(c.rwc, StateClosed) }() // TLS関連処理 if tlsConn, ok := c.rwc.(*tls.Conn); ok { ... } // HTTP/1.x from here on. ctx, cancelCtx := context.WithCancel(ctx) // このcancelCtx関数が今回テーマにしているcancelを行う関数です c.cancelCtx = cancelCtx defer cancelCtx() // c.rはコネクションのreadを管理します c.r = &connReader{conn: c} // bufferリングしているだけ c.bufr = newBufioReader(c.r) c.bufw = newBufioWriterSize(checkConnErrorWriter{c}, 4<<10) for { // request/responseを初期化し、いろいろな処理をします // 後述 w, err := c.readRequest(ctx) // errの処理や様々な処理 req := w.req // readしていないリクエストボディがまだ存在する場合、EOFになった際にstartBackgroundReadするよう登録します // req.Body.onHitEOFに登録され、req.Bodyをreadする実装において、EOFに到達したらonHitEOF関数を呼ぶようになってます。 // 存在しなければすぐにstartBackgroundReadを実行します(処理内容は後述) if requestBodyRemains(req.Body) { registerOnHitEOF(req.Body, w.conn.r.startBackgroundRead) } else { w.conn.r.startBackgroundRead() } // アプリ側が実装した処理がよばれます serverHandler{c.server}.ServeHTTP(w, w.req) w.cancelCtx() // 主に以下3つの処理を行います // - c.r.abortPendingReadをよびます(後述) // - bufferしていたデータをwriteします // - w.reqBody(req.Bodyと同じ).closeをよびます(全てのデータを読んでいない場合にioutil.Discardに捨てるなどしていてファイルを実際にcloseはしていない) w.finishRequest() // keep-alive処理 // コネクションを使いまわすかどうか判断する // 使いまわさないのであればreturnされ、defer内の処理によりコネクションがcloseされ、使いまわせるならばfor文内のまま // ただ、ずっと使い回すのも無駄(クライアントがすでにcloseしているかもしれない)なのでPeekでtimeoutを設定します // 本題と関係ないですが、この実装はなるほどと感じた if d := c.server.idleTimeout(); d != 0 { c.rwc.SetReadDeadline(time.Now().Add(d)) if _, err := c.bufr.Peek(4); err != nil { return } } // リセットして次のリクエストの処理へ c.rwc.SetReadDeadline(time.Time{}) } }
c.readRequestで呼ばれる一連の処理は以下です。// @net/http/server.go // Read next request from connection. func (c *conn) readRequest(ctx context.Context) (w *response, err error) { // 各種timeoutなどを設定します // ... // 後述 req, err := readRequest(c.bufr, keepHostHeader) // req.ctxはc.cancelCtx関数をよぶとcancelされることがわかります // もちろんw.cancelCtxでもcancelされます ctx, cancelCtx := context.WithCancel(ctx) req.ctx = ctx w = &response{ conn: c, cancelCtx: cancelCtx, req: req, reqBody: req.Body, handlerHeader: make(Header), // ... } w.cw.res = w w.w = newBufioWriterSize(&w.cw, bufferBeforeChunkingSize) return w, nil } // @net/http/request.go // Headerを全て読み込みreq.Headerにつめこみます // Bodyは一切readしていないのがポイントです func readRequest(b *bufio.Reader, deleteHostHeader bool) (req *Request, err error) { tp := newTextprotoReader(b) req = new(Request) // First line: GET /index.html HTTP/1.0 var s string if s, err = tp.ReadLine(); err != nil { return nil, err } // ... // ... if err != nil { return nil, err } req.Header = Header(mimeHeader) // 後述 err = readTransfer(req, b) if err != nil { return nil, err } return req, nil } // @net/http/transfer.go // msg is *Request or *Response. func readTransfer(msg interface{}, r *bufio.Reader) (err error) { t := &transferReader{RequestMethod: "GET"} // Unify input isResponse := false switch rr := msg.(type) { case *Response: // 省略 case *Request: t.Header = rr.Header t.RequestMethod = rr.Method t.ProtoMajor = rr.ProtoMajor t.ProtoMinor = rr.ProtoMinor // ... } // Content-Lengthをもとに長さを返却します realLength, err := fixLength(isResponse, t.StatusCode, t.RequestMethod, t.Header, t.TransferEncoding) // Prepare body reader. ContentLength < 0 means chunked encoding // or close connection when finished, since multipart is not supported yet switch { case chunked(t.TransferEncoding): // HTTP1.1のChunked transfer encodingの場合は最後の0\r\n を読み込んだ時にEOFを返却するようなio.Readerをbody.srcに埋めます t.Body = &body{src: internal.NewChunkedReader(r), hdr: msg, r: r, closing: t.Close} } case realLength > 0: // 通常のリクエストの場合はrealLengthよみこんだらEOFを返却するio.Readerをbody.srcに埋めます t.Body = &body{src: io.LimitReader(r, realLength), closing: t.Close} // ... } // Unify output switch rr := msg.(type) { case *Request: rr.Body = t.Body rr.ContentLength = t.ContentLength rr.TransferEncoding = t.TransferEncoding rr.Close = t.Close rr.Trailer = t.Trailer case *Response: // ... } return nil }これで全体像は把握できましたでしょうか。すぐに理解は難しい(自分も理解にかなり時間がかかりました)かもしれませんが、なんとなくイメージがわければ幸いです。
では、本題のコネクションがcloseされているかを監視する処理はどこにあるのかというと、気づいている方も多いかと思いますが、
serverHandler{c.server}.ServeHTTP(w, w.req)の直前に実行もしくはEOF到達時のcallbackされるよう登録されているstartBackgroundReadです。こちらはほぼそのままソースをのせます。
func (cr *connReader) startBackgroundRead() { cr.lock() defer cr.unlock() if cr.inRead { panic("invalid concurrent Body.Read call") } if cr.hasByte { return } // inReadはread中である場合はtrueにする必要があります cr.inRead = true cr.conn.rwc.SetReadDeadline(time.Time{}) // backgroundでコネクションを監視していることがわかります // 瞬時にコネクションcloseに気づけるのはこのためだとわかります!! go cr.backgroundRead() } func (cr *connReader) backgroundRead() { n, err := cr.conn.rwc.Read(cr.byteBuf[:]) cr.lock() // 普通はHTTPの場合レスポンスを受け取る前に新たにリクエストを送ることはプロトコル上許されないので常にn=0になるはずです // HTTP/1.x pipeliningの場合は上記が許されているがコメントを読む限り以下のよう // - HTTP/1.x pipeliningの場合はコネクションclose時にcontextをキャンセルしない // - サーバがwriteしたときにエラーになり気づけるはずではある // - サーバが全くwriteしなかったら永遠にcontextがキャンセルされないがそれはHTTP/1.x pipeliningの仕様が悪い if n == 1 { cr.hasByte = true // コメント省略 // Fortunately, almost nothing uses HTTP/1.x pipelining. // Unfortunately, apt-get does, or sometimes does. // New Go 1.11 behavior: don't fire CloseNotify or cancel // contexts on pipelined requests. Shouldn't affect people, but // fixes cases like Issue 23921. This does mean that a client // closing their TCP connection after sending a pipelined // request won't cancel the context, but we'll catch that on any // write failure (in checkConnErrorWriter.Write). // If the server never writes, yes, there are still contrived // server & client behaviors where this fails to ever cancel the // context, but that's kinda why HTTP/1.x pipelining died // anyway. } if ne, ok := err.(net.Error); ok && cr.aborted && ne.Timeout() { // 他のgoroutineが意図的にreadをやめさせるためにabortPendingReadをcallした結果なので正常です // Ignore this error. It's the expected error from // another goroutine calling abortPendingRead. } else if err != nil { cr.handleReadError(err) } cr.aborted = false cr.inRead = false cr.unlock() cr.cond.Broadcast() } // 正常時のfinishrequestもよばれます // コネクションをreadしている処理をabortさせたいために一時的にタイムアウト判定させ、その後戻しています func (cr *connReader) abortPendingRead() { cr.lock() defer cr.unlock() if !cr.inRead { return } cr.aborted = true cr.conn.rwc.SetReadDeadline(aLongTimeAgo) for cr.inRead { cr.cond.Wait() } cr.conn.rwc.SetReadDeadline(time.Time{}) } // handleReadError is called whenever a Read from the client returns a // non-nil error. // // The provided non-nil err is almost always io.EOF or a "use of // closed network connection". In any case, the error is not // particularly interesting, except perhaps for debugging during // development. Any error means the connection is dead and we should // down its context. // // It may be called from multiple goroutines. func (cr *connReader) handleReadError(_ error) { // 既出のとおり、cr.conn.cancelCtxをよぶとreq.ctxがcancelされます cr.conn.cancelCtx() cr.closeNotify() }1点だけ補足します。
backgroundReadはコネクションをreadしようとして正常時はずっとブロックされているはずで、それはabortPendingReadのcr.conn.rwc.SetReadDeadline(aLongTimeAgo)で直ちにブロック解除しreturnされるようなソースの書きっぷりですが、たしかにnet.Connのinterfaceのコメントに// SetReadDeadline sets the deadline for future Read calls // and any currently-blocked Read call. // A zero value for t means Read will not time out. SetReadDeadline(t time.Time) error書いてあり、これからReadされる処理だけでなく、現在Readでブロックされている処理にもdeadlineを設定できるようです。
ソケットをReadしてブロックしているのだからOSレベルでblockしているのでそんな制御ができるのか??
と思うかもしれませんが、よくよくソースを追っていくとGoのソケットは内部的な実装は非同期で実装されていることがわかります。このあたりは自分もほぼソース追えてませんが、このブログやそのリンクが参考になります。
要は、公開interfaceとしては同期I/Oであるが、Goのランタイムでは
epollなどを利用した非同期I/Oのようです。Goすごいですね!!要するに
だいぶ長くなり、だいぶ脱線もしてしまったので最後にまとめます。
どのようにconnectionのcloseを検知し、
Request.ctxをキャンセルしているかの答えは以下であることがわかりました。リクエストボディが(アプリのロジックにより)EOFまで読まれたら、コネクションをReadする処理が新しいgoroutineで起動します。このReadが意図していないエラーを返却した場合、コネクションがcloseされたことに起因しているはずであり、request.ctxをcancelする実装になっています。これによって、
ServeHTTPを実装しているアプリ側で特に意識することなく、Request.contextを元にコネクションがcloseされていることに気づけることになります。一歩引いて、tcpにおいてこのように通信相手がcloseしたかを瞬時に把握するのは一般的に可能なのかを考えてみましょう。
tcpプロトコルとして必要な要素は「通信相手が送信し終わったことがreadした内容でわかる」ことが条件になると思います。httpの場合はcontent-lengthというheaderの値や、もしくはChunked_transfer_encodingの場合は
0\r\nで終わらせるとするという取り決めで担保されてます。同じhttpでもHTTP/1.x pipeliningの場合は終わりがわからないため無理です。では、言語的な制約はどうでしょう。相手がcloseしたことを瞬時に検知するためには事前に
readしていなければいけません。(もちろんnon blockでreadをpollingすることも可能でしょうけどやりたくはありません)
そのため、そのreadを任意のタイミングでabortさせられるサポートが必要となります。Goの場合は既出のようにランタイムの実装が実は非同期IOで簡単にabortできるので負担なく実装することができてます。キャンセルを伝播させたくないときには
クライアントによるタイムアウト等で
request.ctxがキャンセルされたことによってアプリのコンテキストがキャンセルされるのが好ましくないこともあるでしょう。その場合は、単純に
context.Background()等で最初のcontextを作成すればいいですが、場合によっては利用しているライブラリがRequest.ctxを参照しているケースもあるでしょう。その場合は、middlewareの最初の処理で、
Request.Clone(context.Background())で上書きしてあげればいいと思います。