cd TPL/hdf5
wget https://support.hdfgroup.org/ftp/HDF5/releases/hdf5-1.12/hdf5-1.12.0/src/hdf5-1.12.0.tar.gz
tar-zxvf ./hdf5-1.12.0.tar.gz
cd hdf5-1.12.0
../runconfigure.sh
cd ../../netcdf
wget https://www.unidata.ucar.edu/downloads/netcdf/ftp/netcdf-c-4.7.4.tar.gz
tar-zxvf ./netcdf-c-4.7.4.tar.gz
cd netcdf-c-4.7.4/
mkdir build
cd build
sh ../../runcmake.sh
make && make install
cd ../../../../
mkdir build
../cmake-exodus
make && make install
cd TPL/hdf5
wget https://support.hdfgroup.org/ftp/HDF5/releases/hdf5-1.12/hdf5-1.12.0/src/hdf5-1.12.0.tar.gz
tar-zxvf ./hdf5-1.12.0.tar.gz
cd hdf5-1.12.0
../runconfigure.sh
cd ../../netcdf
wget https://www.unidata.ucar.edu/downloads/netcdf/ftp/netcdf-c-4.7.4.tar.gz
tar-zxvf ./netcdf-c-4.7.4.tar.gz
cd netcdf-c-4.7.4/
mkdir build
cd build
sh ../../runcmake.sh
make && make install
cd ../../../../
mkdir build
../cmake-exodus
make && make install
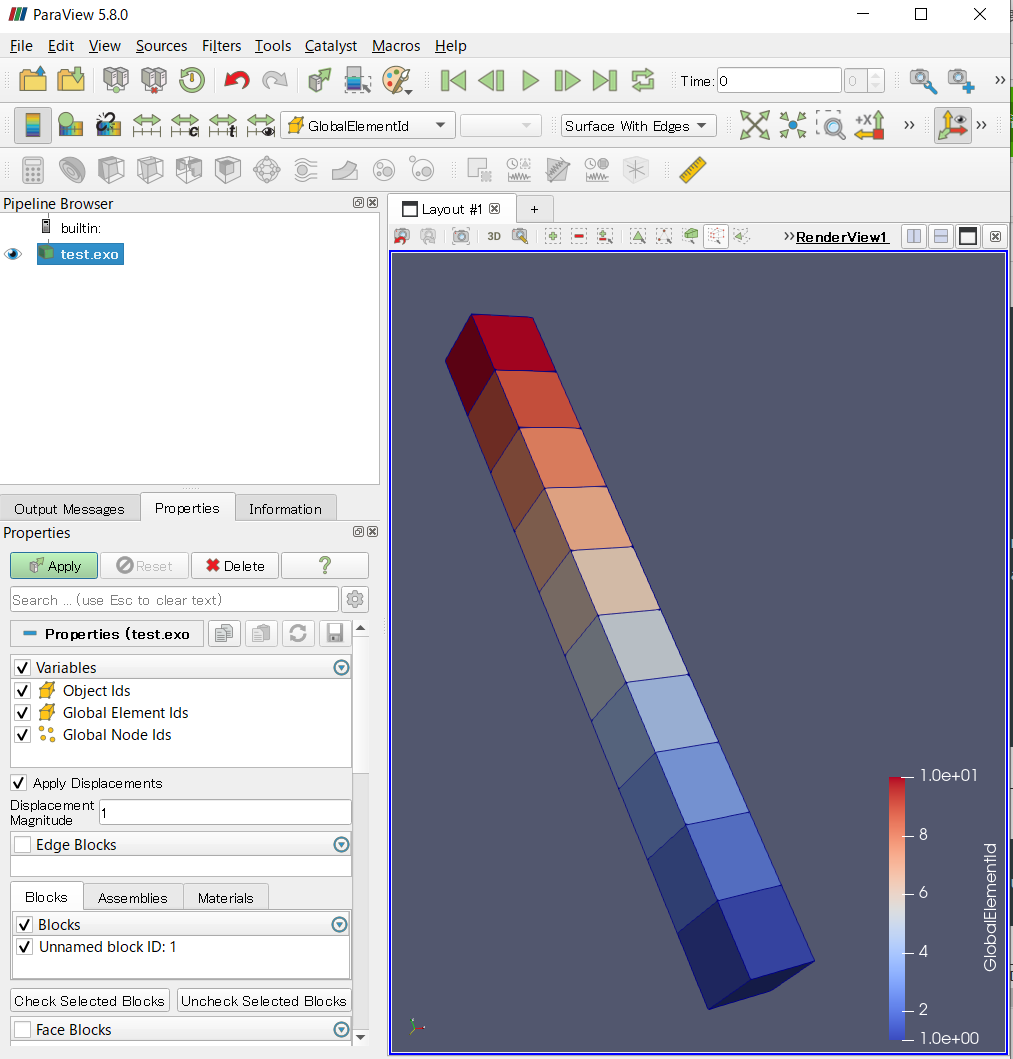
サンプルとして、寸法が1 x 1 x 10の片持ち梁を10個の8節点6面体要素で分割したメッシュをEXODUS形式で出力する場合のコードを書きに示します。
#include <exodusII.h>
#include <iostream>
#include <vector>
intmain(){intN;N=10;// the length of cantileverintCPU_word_size,IO_word_size,exoid;CPU_word_size=sizeof(double);IO_word_size=8;exoid=ex_create("test.exo",//file NameEX_CLOBBER,//create mode&CPU_word_size,//CPU float word size in bytes&IO_word_size);//I/O float word size in bytesintdim=3;// dimensionintNoN=4+4*N;// num of nodesintNoE=N;// num of elementsintNoEB=1;// num of element blocksintNoNS=0;// num of node setsintNoSS=0;// num of side setsex_put_init(exoid,"Test",dim,NoN,NoE,NoEB,NoNS,NoSS);std::vector<double>x(NoN),y(NoN),z(NoN),i2nn(NoN);char*coord_names[3];coord_names[0]="xcoor";coord_names[1]="ycoor";coord_names[2]="zcoor";for(inti=0;i<=N;i++){x[i*4]=0;y[i*4]=0;z[i*4]=i;i2nn[i*4]=i*4+1;x[i*4+1]=1;y[i*4+1]=0;z[i*4+1]=i;i2nn[i*4+1]=i*4+2;x[i*4+2]=1;y[i*4+2]=1;z[i*4+2]=i;i2nn[i*4+2]=i*4+3;x[i*4+3]=0;y[i*4+3]=1;z[i*4+3]=i;i2nn[i*4+3]=i*4+4;}ex_put_coord(exoid,x.data(),y.data(),z.data());ex_put_coord_names(exoid,coord_names);ex_put_node_num_map(exoid,i2nn.data());//for(int i=0;i<NoE;i++)i2nn[i] = i+1;intNoN_for_EB=NoE;// number of nodes for element blockintNoN_per_Elem=8;// number of nodes of each elementintebid=1;// element block idex_put_elem_block(exoid,ebid,"hex",NoN_for_EB,NoN_per_Elem,0);std::vector<int>connectivity(NoE*NoN_per_Elem);std::vector<int>i2en(NoE);// index to element numberfor(inti=0;i<NoE;i++){for(intj=0;j<8;j++){connectivity[i*8+j]=i*4+j+1;}i2en[i]=i+1;}ex_put_elem_conn(exoid,ebid,connectivity.data());ex_put_elem_num_map(exoid,i2en.data());ex_close(exoid);return0;}