- 投稿日:2019-04-17T23:44:53+09:00
supervisordでpythonのpyramidフレームワークをデーモン化する
supervisord
知っていますか。
デーモン化するやつです。
これでスタートとかすると、起動します。
ストップとかすると止まります。
なんと、スーパーユーザじゃなくて出来ます。手順
今回は、pythonのpyramidフレームワークでWEBアプリを作ってデーモン化します
仮想環境の作成
python3 -m venv env3 source env3/bin/activate使用するライブラリのインストール
pip install pyramid pip install mr.laforge pip install supervisord使用できるpyramidのテンプレートを確認する
今回はstarterでやろう
pcreate --list-templates Available scaffolds: alchemy: Pyramid project using SQLAlchemy, SQLite, URL dispatch, and Jinja2 starter: Pyramid starter project using URL dispatch and Jinja2 zodb: Pyramid project using ZODB, traversal, and Chameleonプロジェクトの作成してインストール
pcreate -t starter hello cd hello pip install -e .通常起動を確認する
pserve development.ini
supervisord.conf作成
[supervisord] childlogdir = log logfile = supervisord.log logfile_maxbytes = 50MB logfile_backups = 10 loglevel = info pidfile = supervisord.pid minfds = 1024 umask = 022 nodaemon = false nocleanup = false [inet_http_server] port = 127.0.0.1:7001 username = password = [supervisorctl] serverurl = http://localhost:7001 username = password = [ctlplugin:laforge] supervisor.ctl_factory = mr.laforge.controllerplugin:make_laforge_controllerplugin [rpcinterface:supervisor] supervisor.rpcinterface_factory=supervisor.rpcinterface:make_main_rpcinterface [program:hello] command = /Users/xxx/env3/bin/pserve /Users/xxx/hello/development.ini process_name = hello directory = /Users/xxx/hello/ priority = 10 numprocs = 1 redirect_stderr = true autostart = falsesupervisorの起動
こちらでsupervisordが立ち上がります
suppervisord -c supervisord.confsupervisorctlの対話モードに入ります
supervisorctlsupervisorctlの使い方
これで、デーモン化した、pyramidが起動します。http://localhost:6543/
supervisor> start helloこれで、デーモン化した、pyramidが終了します。
supervisor> stop hello対話型supervisorctlから抜けます。
supervisor> exitこれで、supervisorctlを終了します。
supervisor> shutdown

- 投稿日:2019-04-17T21:53:24+09:00
おしゃれ並列Grid Search
Joblibでぱぱっと書きました
def job(X, y, params): ... def grid_search(X, y, search_space, n_jobs=-1): search_space = [[(k, v) for v in space] for k, space in search_space.items()] tasks = [] for params in product(*search_space): tasks.append({ 'job': delayed(job)(X, y, *[p for _, p in params]), **dict(params) }) with Parallel(n_jobs=n_jobs) as p: results = p([task.pop('job') for task in tasks]) results = [{**result, **task} for task, result in zip(tasks, results)] results = pd.DataFrame(results) return results X, y = get_data() search_space = { 'param_a': [1, 3, 5, 7], 'param_b': ['a', 'b', 'c'], ..., } results = grid_search(X, y, search_space)
- 投稿日:2019-04-17T21:38:43+09:00
量子テレポーテーション、やってみた
$$
\def\bra#1{\mathinner{\left\langle{#1}\right|}}
\def\ket#1{\mathinner{\left|{#1}\right\rangle}}
\def\braket#1#2{\mathinner{\left\langle{#1}\middle|#2\right\rangle}}
$$自作の量子計算シミュレータを使って、量子テレポーテーション、やってみたよ。
はじめに
「量子テレポーテーション」のお勉強です。以下を参考にさせていただきました。
- 量子テレポーテーション - Wikipedia
- EMANの物理学:量子力学:量子テレポーテーション
- 吾輩は量子プログラミング言語である。名前はまだ無い。 Microsoftで生れ量子テレポーテーションした事だけは記憶している。
- 量子テレポーテーションを実際にやってみた話
量子テレポーテーションというのは、量子もつれを利用して、ある量子状態をそのまま他方に転送することを言います。「テレポーテーション」といっても物体が瞬間移動するわけではありませんし、光速を超えて情報伝達がなされるわけでもありません。
いま、送信者をAlice、受信者をBobと呼ぶことにします。まず、2つの「量子(例えば、光子)」をもつれさせて、一方をAlice、他方をBobに渡します。光子は電子スピンと同様、2つの状態の重ね合わせで表現できる「量子」なので、スピンのように、もつれさせることができます(と思ってください)。
Aliceは、もう一つ別の「量子」をもっていて、これを適当な重ね合わせ状態にします。この量子状態をBobに転送(テレポート)することを考えます。どうやるかというと、、、
Aliceは転送したい「量子」ともつれている片割れの「量子」の2つを合わせて「ベル測定」という特別な測定を行います。ベル測定というのは、2つの量子状態を一度に測定するもので、結果は4つの状態のいずれかになります。
AliceはBobに、この測定結果を通常の通信路で伝達します。Bobはそれ受け取り、その測定結果に応じて、自分がもっている、もつれている片割れの「量子」に、ある操作(量子ゲート)を適用します。そうすると、あーら不思議、Bobがもっている「量子」が、Aliceが転送したかった量子状態そのものにすり替わっているではありませんか!驚き!となります。
ざっくり、文書で書くと以上のようなことなのですが、なぜこんなことになるのか、次に、数式で確認してみましょう。
原理
3つの量子ビットを用意します。0番目をAliceがBobに送信したい量子ビットとします。1番目と2番目はもつれさせて、1番目をAliceに渡し、2番目をBobに渡すものとします。
0番目(AliceがBobに送信したいもの)を、とりあえず、
\ket{\psi} = \alpha \ket{0} + \beta \ket{1}と書いておきます(後述するシミュレータではX軸周りとZ軸周りの回転ゲートで、適当な量子状態を作成して、$\alpha$と$\beta$を決めています)。
1番目と2番目は、以下のようにアダマールゲートと制御NOTゲートを通して、もつれさせます。
q1 |0> ----H--*--- q2 |0> -------CX--そうすると、1番目と2番目の量子ビットに関して、以下の量子状態ができます。
\frac{1}{\sqrt{2}} (\ket{0}_{1}\ket{0}_{2} + \ket{1}_{1}\ket{1}_{2})先程の0番目と合わせると、トータルで以下のような状態になります。
\frac{1}{\sqrt{2}} \ket{\psi}_{0} (\ket{0}_{1}\ket{0}_{2} + \ket{1}_{1}\ket{1}_{2}) \tag{1}ここで、Aliceが「ベル測定」を行うのですが、その説明をします。いま、2量子系を考えているので、その測定は、数学的には4つの基底への射影演算をやることに相当します。ベル測定とは、以下の4つの基底への射影演算として定義されます。
\ket{\Phi^{+}} = \frac{1}{\sqrt{2}} (\ket{00} + \ket{11}) \\ \ket{\Phi^{-}} = \frac{1}{\sqrt{2}} (\ket{00} - \ket{11}) \\ \ket{\Psi^{+}} = \frac{1}{\sqrt{2}} (\ket{01} + \ket{10}) \\ \ket{\Psi^{-}} = \frac{1}{\sqrt{2}} (\ket{01} - \ket{10})定義がわかったので、(1)式の0番目と1番目の量子ビットに対してベル測定をやってみます。射影演算は4つあります。各々、測定後の結果を列挙します。
- $\ket{\Phi^{+}}$への射影
\begin{align} &\frac{1}{\sqrt{2}} \ket{\Phi^{+}}_{01} \bra{\Phi^{+}}_{01} \ket{\psi}_{0} (\ket{0}_{1}\ket{0}_{2} + \ket{1}_{1}\ket{1}_{2}) \\ &= \frac{1}{\sqrt{2}} \ket{\Phi^{+}}_{01} (\alpha \bra{0}_{1} + \beta\bra{1}_{1}) (\ket{0}_{1} \ket{0}_{2} + \ket{1}_{1} \ket{1}_{2}) \\ &= \frac{1}{\sqrt{2}} \ket{\Phi^{+}}_{12} (\alpha \ket{0}_{2} + \beta \ket{1}_{2}) \tag{2} \end{align}\\同様にして、他の3つも計算できます。
- $\ket{\Phi^{-}}$への射影
\begin{align} &\frac{1}{\sqrt{2}} \ket{\Phi^{-}}_{01} \bra{\Phi^{-}}_{01} \ket{\psi}_{0} (\ket{0}_{1}\ket{0}_{2} + \ket{1}_{1}\ket{1}_{2}) \\ &= \frac{1}{\sqrt{2}} \ket{\Phi^{-}}_{01} (\alpha \ket{0}_{2} - \beta \ket{1}_{2}) \tag{3} \end{align}
- $\ket{\Psi^{+}}$への射影
\begin{align} &\frac{1}{\sqrt{2}} \ket{\Psi^{+}}_{01} \bra{\Psi^{+}}_{01} \ket{\psi}_{0} (\ket{0}_{1}\ket{0}_{2} + \ket{1}_{1}\ket{1}_{2}) \\ &= \frac{1}{\sqrt{2}} \ket{\Psi^{+}}_{01} (\beta \ket{0}_{2} + \alpha \ket{1}_{2}) \tag{4} \end{align}
- $\ket{\Psi^{-}}$への射影
\begin{align} &\frac{1}{\sqrt{2}} \ket{\Psi^{-}}_{01} \bra{\Psi^{-}}_{01} \ket{\psi}_{0} (\ket{0}_{1}\ket{0}_{2} + \ket{1}_{1}\ket{1}_{2}) \\ &= \frac{1}{\sqrt{2}} \ket{\psi^{-}}_{01} (-\beta \ket{0}_{2} + \alpha \ket{1}_{2}) \tag{5} \end{align}上の4つの式を眺めてみると、どうでしょう。なんとなく2番目の量子ビットの状態が、もともとAliceが設定した状態に似ていることがわかると思います((2)式はそのものです)。2番目の量子ビットは、Bobに渡してあったものなのですが、Aliceが測定することで、遠隔地にいるBobが持っている量子に影響を及ぼすことができる、というのが量子もつれの不思議なところであり、量子テレポーテーションの肝でもあります。
さて、あとはBobがもっている2番目の量子ビットを操作して、Aliceの最初の0番目の状態に完全に一致させることを考えます。これは、Aliceからベル測定の結果が何だったかを教えてもらえれば、簡単で、
- $\ket{\Phi^{+}}$の場合
q2 --I-- # 何もしない
- $\ket{\Phi^{-}}$の場合
q2 --Z--
- $\ket{\Psi^{+}}$の場合
q2 --X--
- $\ket{\Psi^{-}}$の場合
q2 --X--Z--という量子ゲートに通してあげれば、Aliceが転送したかった状態を2番目の量子ビットに完全再現することができる、というわけです。
シミュレータで実行(その1)
では、シミュレータで、以上のことが本当にできるか確認してみましょう。が、ちょっと待ってください。ベル測定ってシミュレータでどうやるんでしたっけ?という疑問がわいてきますよね。
実は、普通の測定(Z方向の測定)でベル測定できるようにするために、ちょっとした工夫が必要になります。具体的には、以下の回路を通してあげます。
q0 --*---H--M -> b0 q1 --CX-----M -> b1この制御NOTゲートとアダマールゲートの組み合わせで、通常の基底からベル基底に変換することができるのです(ここで、b0,b1は最後の測定結果に応じて0/1の値が格納される古典レジスタです)。
ベル基底の4つの状態を上の回路に(頭の中で!?)通してみれば、すぐにわかります(以下、正規化の係数はいちいち書くのが面倒なので省略しました)。
\begin{align} \ket{\Phi^{+}} &= \ket{00} + \ket{11} \\ &\rightarrow (\ket{0} + \ket{1}) \ket{0} + (\ket{0} - \ket{1}) \ket{0} = \ket{00} \\ \ket{\Phi^{-}} &= \ket{00} - \ket{11} \\ &\rightarrow (\ket{0} + \ket{1}) \ket{0} - (\ket{0} - \ket{1}) \ket{0} = \ket{10} \\ \ket{\Psi^{+}} &= \ket{01} + \ket{10} \\ &\rightarrow (\ket{0} + \ket{1}) \ket{1} + (\ket{0} - \ket{1}) \ket{1} = \ket{01} \\ \ket{\Psi^{-}} &= \ket{01} - \ket{10} \\ &\rightarrow (\ket{0} + \ket{1}) \ket{1} - (\ket{0} - \ket{1}) \ket{1} = \ket{11} \\ \end{align}となって、ベル基底とb0,b1の値のセットとが対応づけられるようになります。つまり、b0,b1の観測をすることが、すなわちベル測定したことになる、という寸法です。
さて、ようやくシミュレーションの準備が整いました。
qlazyで実行します。測定結果に応じて、適用する量子回路を変えないといけないので、Linuxコマンドではちょっとやりにくいです。なので、Pythonでやってみます。コードは、以下の通りです。from qlazypy import QState qs = QState(3) # prepare qubit (id=0) that Alice want to send to Bob by rotating around X,Z qs.ry(0,phase=0.3).rz(0,phase=0.4) # make entangled 2 qubits (id=1 for Alice, id=2 for Bob) qs.h(1).cx(1,2) # initial state (before teleportation) print("== Alice (initial) ==") qs.show(id=[0]) print("== Bob (initial) ==") qs.show(id=[2]) # Alice execute Bell-measurement to her qubits 0,1 qs.cx(0,1).h(0) b0 = qs.m(id=[0],shots=1).lst b1 = qs.m(id=[1],shots=1).lst print("== Bell measurement ==") print("b0,b1 = ", b0,b1) # Bob operate his qubit (id=2) according to the result if b0 == 0 and b1 == 0: # phi+ pass elif b0 == 0 and b1 == 1: # psi+ qs.x(2) elif b0 == 1 and b1 == 0: # psi- qs.z(2) elif b0 == 1 and b1 == 1: # phi- qs.x(2).z(2) # final state (before teleportation) print("== Alice (final) ==") qs.show(id=[0]) print("== Bob (final) ==") qs.show(id=[2]) qs.free()これを実行すると、
== Alice (initial) == c[0] = +0.8910+0.0000*i : 0.7939 |+++++++++ c[1] = +0.1403+0.4318*i : 0.2061 |+++ == Bob (initial) == c[0] = +0.0000+0.0000*i : 0.0000 | c[1] = +1.0000+0.0000*i : 1.0000 |+++++++++++ == Bell measurement == b0,b1 = 1 0 == Alice (final) == c[0] = +0.0000+0.0000*i : 0.0000 | c[1] = +1.0000+0.0000*i : 1.0000 |+++++++++++ == Bob (final) == c[0] = +0.8910+0.0000*i : 0.7939 |+++++++++ c[1] = +0.1403+0.4318*i : 0.2061 |+++となり、確かに、最初Aliceが持っていた量子状態が、きちんとBobの量子ビットに乗り移っていることがわかります。めでたしめでたし!
シミュレータで実行(その2)
ここで、説明を終了しても良いのですが、もうひとつの実行例を掲載しておきます。実は、ベル測定そのものを実装したので、その動作も確認してみました。mb()というメソッドでベル測定を実行できます。コードは以下の通りです。
from qlazypy import QState BELL_PHI_PLUS = 0 BELL_PHI_MINUS = 3 BELL_PSI_PLUS = 1 BELL_PSI_MINUS = 2 qs = QState(3) # prepare qubit (id=0) that Alice want to send to Bob by rotating around X,Z qs.ry(0,phase=0.3).rz(0,phase=0.4) # make entangled 2 qubits (id=1 for Alice, id=2 for Bob) qs.h(1).cx(1,2) # initial state (before teleportation) print("== Alice (initial) ==") qs.show(id=[0]) print("== Bob (initial) ==") qs.show(id=[2]) # Alice execute Bell-measurement to her qubits 0,1 print("== Bell measurement ==") result = qs.mb(id=[0,1],shots=1).lst # Bob operate his qubit (id=2) according to the result if result == BELL_PHI_PLUS: print("result: phi+") elif result == BELL_PSI_PLUS: print("result: psi+") qs.x(2) elif result == BELL_PSI_MINUS: print("result: psi-") qs.x(2).z(2) elif result == BELL_PHI_MINUS: print("result: phi-") qs.z(2) # final state (before teleportation) print("== Alice (final) ==") qs.show(id=[0]) print("== Bob (final) ==") qs.show(id=[2]) qs.free()これを実行すると、
== Alice (initial) == c[0] = +0.8910+0.0000*i : 0.7939 |+++++++++ c[1] = +0.1403+0.4318*i : 0.2061 |+++ == Bob (initial) == c[0] = +1.0000+0.0000*i : 1.0000 |+++++++++++ c[1] = +0.0000+0.0000*i : 0.0000 | == Bell measurement == result: psi- == Alice (final) == c[0] = +1.0000+0.0000*i : 1.0000 |+++++++++++ c[1] = +0.0000+0.0000*i : 0.0000 | == Bob (final) == c[0] = +0.8910+0.0000*i : 0.7939 |+++++++++ c[1] = +0.1403+0.4318*i : 0.2061 |+++となり、こちらも無事テレポーテーション成功です!
以上
- 投稿日:2019-04-17T21:27:31+09:00
備忘録③ URLの規則性を見つけてページ遷移してスクレイピング
初めに
サイト全体をわざわざクローリングしてまでページ遷移するのはめんどくさいですね(やったことないけど)
例えばサイト情報をスクレイピングするとき
ページのURLの変化に規則性があれば、次のコードが使えるかもしれませんコード 例
https://gigazine.net
の2~6ページのサイトコードをスクレイピングしてみますpagesimport requests for n in range(1,5): page=requests.get("https://gigazine.net/P"+str(n*40)) #規則性# page.encoding = page.apparent_encoding print (page.text)Gigazinでは、次のページに行くごとにベースのURL(https://gigazine.net/)に
Pと40×(ページの遷移した数)が後に続きます終わり
サクッとデータ収集する時に使えそうな感
これに加えて例外を飛ばしたり
BeautifulSoup でもう少し具体化して収集してPandasとかでデータを整形できるようになりたい備忘録④ 予定
後記
その後のコードの発展形を備忘録していきます
アイディア・指摘・コメントでくださいGigazin_links#2~6ページの記事リンク取得 import requests from bs4 import BeautifulSoup for n in range(1,5): page=requests.get("https://gigazine.net/P"+str(n*40)) page.encoding = page.apparent_encoding #print (page.text) soup = BeautifulSoup(page.text, 'html.parser') #print(soup.title) imgs = soup.find(class_="content") for i in imgs.find_all("img"): print(i.get("data-src"))
- 投稿日:2019-04-17T21:15:12+09:00
くまのプーさんの名言「何もしないをしよう」の類似表現を機械学習(Doc2vec)で探す
目的
日常を生きていると、常に「何かをしなければ」と思ってしまいがちです。
しかしながら、「何かをすること」が必ずしも本当に重要な事に繋がっていない事もしばしばあります。
この場合は「何もしない」をすることが実は自分を客観的に見直せるきっかけになることを、
くまのプーさんは教えてくれています。
なのですが、
結構「何もしないをする」の抽象度が高く、自分なりに都合よく解釈しがちなのも事実だと思います。
従いまして、客観的に上記の意味を捉えるため、機械学習(Doc2vec)を用いて類似表現を探したいと思います。準備
1.Doc2vecをインストールする。
下記を参照してインストールします。
2.Doc2vecの学習済みモデルを取得する。
下記サイト""よりダウンロードさせて頂きます。
日本語WIKIPEDIAで学習したDOC2VECモデル
dbow300d解凍
$ tar zxvf jawiki.doc2vec.dbow300d.tar.bz23.機械学習用コード作成
下記3step.で処理します。コードは後述。
step1.学習モデルのロード(Doc2vec.load)
step2.入力テキストの構文解析(Mecab.tagger)
step3.テキストから類似表現取得(docvecs.most_similar)コード
# -*- coding: utf-8 -*- from gensim.models.doc2vec import Doc2Vec import MeCab import numpy as np def tokenize(text): wakati = MeCab.Tagger("-O wakati") wakati.parse("") return wakati.parse(text).strip().split() model = Doc2Vec.load("jawiki.doc2vec.dbow300d.model") text="何もしないをしよう" out=model.docvecs.most_similar([model.infer_vector(tokenize(text))]) print( out ); text="自分を変えるものは、自分で作るものだ。" out=model.docvecs.most_similar([model.infer_vector(tokenize(text))]) print( out ); text="君が100まで生きるなら、 僕は君より1日少なく生きたいよ。 だって、君がいない人生なんて、 無いのと同じだからね。" out=model.docvecs.most_similar([model.infer_vector(tokenize(text))]) print( out );テスト
「何もしないをしよう」
[('虜', 0.6765191555023193), ('岡田淮一', 0.6655471324920654), ('レイノルド・シルキー', 0.6532681584358215), ('ミラノ・フプツェイ', 0.6495197415351868), ('フォレスト・ガンダー', 0.6368730068206787), ('タックス・ヘブン', 0.6367721557617188), ('バルタサー・ハブマイヤー', 0.6332018971443176), ('ボルトネック', 0.6331052780151367), ('官弊社', 0.6319104433059692), ('上諏訪市', 0.6254733800888062)]→虜なんですね!
「自分を変えるものは、自分で作るものだ。」
[('オオツヤヒサシサイカブト', 0.6657865643501282), ('虜', 0.6558833122253418), ('オキサリルジヒドラジド', 0.6334289312362671), ('足型', 0.6331846714019775), ('マックロ', 0.6315746307373047), ('的 (曖昧さ回避)', 0.625438392162323), ('バルタサー・ハブマイヤー', 0.6228896975517273), ('レイノルド・シルキー', 0.6207892894744873), ('フォレスト・ガンダー', 0.6185415387153625), ('上諏訪市', 0.6169095039367676)]→「オオツヤヒサシサイカブト」はカブトムシですね。
「君が100まで生きるなら、 僕は君より1日少なく生きたいよ。 だって、君がいない人生なんて、 無いのと同じだからね。」
[('ミラノ・フプツェイ', 0.678257167339325), ('桑田圭祐', 0.6598429679870605), ('レイノルド・シルキー', 0.6597413420677185), ('岡田淮一', 0.650931179523468), ('楠正成', 0.6494807004928589), ('上諏訪市', 0.6473155617713928), ('ボトムネック', 0.646905779838562), ('聴きたかったダンスミュージック、リキッドルームに', 0.6437188386917114), ('碓井峠', 0.6405103206634521), ('クリスタルカイザー', 0.638593852519989)→やはり、桑田佳祐ですね!
TSUNAMIが聴きたくなってきました。
参考文献にも記載がある通り、何もないよりはよいですが、
doc2vecを使いこなすのであれば、学習モデルをもう少しドメイン寄りのものにした方が良さそうです。CodingError対策
ModuleNotFoundError: No module named 'numpy.core._multiarray_umath'ネットで調べたらnumpyと他ライブラリの順序関係が影響しているらしく、numpyを再インストールしたら解決。
$ sudo pip uninstall numpy
$ pip install numpy
Successfully installed numpy-1.16.2参考
くまのプーさん(ディズニー)-wikipedia
Doc2Vecを使用するまでの環境構築手順
日本語WIKIPEDIAで学習したDOC2VECモデル



- 投稿日:2019-04-17T21:02:38+09:00
Leapmotion のサンプルプログラムを動かすためにやったこと ubuntu18.04
これはためになった
まず、leapmotionを使うためには環境を整える必要があり、以下のサイトが参考になった。基本的には以下2つのサイト通りなのだが、エラーが出てしまうらしい。
第302回 Ubuntuで3Dモーションセンサ『Leap Motion』を使う
Leap Motion + Ubuntu16.04 + Unity(ゲームエンジン)
ダウンロードしたもの:V2 Trackingエラーが出たために参考にしたもの。
以下のサイトにあるようにファイルを追加することで、うまく行くらしい
Ubuntu 16.04にLeapMotion導入
Ubuntuに Leap Motion SDKをインストールした作業メモpythonのサンプルコードを走らせるときに見たもの
Leap Motion を Pythonから使う方法を調べた
使わなくてもできるけど参考までに
- 投稿日:2019-04-17T20:54:18+09:00
ROS(Robot Operating System)について学ぶべき全てのことがここにあります

- 投稿日:2019-04-17T20:40:52+09:00
CentOS7で共有ライブラリを追加する
概要
CentOS7では、デフォルトで/libと/usr/lib以下のファイルは、共有ライブラリとして含まれています。
それ以外のディレクトリのライブラリを追加したい場合は、以下のいずれかの方法で設定する必要があります。OpenSSLのインストール
今回は例として、OpenSSLを共有ライブラリに追加するため、インストールをします。
参考:CentOS7にOpenSSL1.1.1をインストール
特定のユーザーのみが使えるようにする方法
LD_LIBRARY_PATHは、/etc/ld.so.confで定義されたパスよりも優先されます。
設定したいディレクトリ以下のライブラリを全て参照するようになります。
$ LD_LIBRARY_PATH=/usr/local/openssl-1.1.1/lib; export LD_LIBRARY_PATH設定したいディレクトリが複数ある場合は、
:で区切って設定します。$ LD_LIBRARY_PATH=/usr/local/lib:/usr/lib; export LD_LIBRARY_PATHちなみに、LD_LIBRARY_PATHの設定を以下で定義しても反映されません。
- $HOME/.profile
- /etc/profile
- /etc/environment
参考:EnvironmentVariables - Community Help Wiki
LD_LIBRARY_PATH についての説明から抜粋
Note: You can only set this environment variable inside an interactive shell. Since Ubuntu 9.04 Jaunty Jackalope, LD_LIBRARY_PATH cannot be set in $HOME/.profile, /etc/profile, nor /etc/environment files. You must use /etc/ld.so.conf.d/*.conf configuration files. See Launchpad bug #366728 for more information.参考:LD_LIBRARY_PATH を設定しても反映されないことがある
システム全体で永続的に使いたい場合
追加するライブラリ
今回は例として、以下のopensslのライブラリ群を追加します。
$ sudo ls -l /usr/local/openssl-1.1.1/lib total 10432 drwxr-xr-x 2 root root 39 Apr 17 04:12 engines-1.1 -rw-r--r-- 1 root root 5599274 Apr 17 04:12 libcrypto.a lrwxrwxrwx 1 root root 16 Apr 17 04:12 libcrypto.so -> libcrypto.so.1.1 -rwxr-xr-x 1 root root 3370584 Apr 17 04:12 libcrypto.so.1.1 -rw-r--r-- 1 root root 1019068 Apr 17 04:12 libssl.a lrwxrwxrwx 1 root root 13 Apr 17 04:12 libssl.so -> libssl.so.1.1 -rwxr-xr-x 1 root root 685240 Apr 17 04:12 libssl.so.1.1 drwxr-xr-x 2 root root 61 Apr 17 04:12 pkgconfig共有ライブラリとして認識されているパスの確認
以下コマンドで読み込まれているパスを確認できます。
$ sudo ldconfig -pライブラリ追加前の状態を確認します。ssl関係のライブラリは
/lib64のもののみ認識されています。$ sudo ldconfig -p | grep libssl libssl3.so (libc6,x86-64) => /lib64/libssl3.so libssl.so.10 (libc6,x86-64) => /lib64/libssl.so.10ライブラリを追加する
システム全体に永続的にライブラリを追加したい場合は、
/etc/ld.so.confに定義します。
実際にファイルの中を見てみると、以下のようになっています。$ sudo cat /etc/ld.so.conf include ld.so.conf.d/*.conf
/etc/ld.so.confで直接定義することもできますが、/etc/ld.so.conf.dの下にファイルを作成して定義することを推奨します。/etc/ld.so.conf.d/openssl-1.1.1.confを作成して、以下を定義します。
/etc/ld.so.conf.d/openssl-1.1.1.conf/usr/local/openssl-1.1.1/libキャッシュファイルを更新
OSはライブラリを検索する際に、/etc/ld.so.confを直接参照するのではなく、/etc/ld.so.cacheというキャッシュファイルを参照するため、以下のコマンドでこのキャッシュファイルを更新します。
$ sudo ldconfigライブラリが追加されたことを確認
以下コマンドで
/usr/local/openssl-1.1.1/lib以下のライブラリが追加されたことを確認できます。$ sudo ldconfig -p | grep libssl libssl3.so (libc6,x86-64) => /lib64/libssl3.so libssl.so.10 (libc6,x86-64) => /lib64/libssl.so.10 + libssl.so.1.1 (libc6,x86-64) => /usr/local/openssl-1.1.1/lib/libssl.so.1.1 + libssl.so (libc6,x86-64) => /usr/local/openssl-1.1.1/lib/libssl.so関連記事
参考
- 投稿日:2019-04-17T20:40:52+09:00
CentOS7でldconfigを使って共有ライブラリを追加する
概要
CentOS7では、デフォルトで/libと/usr/lib以下のファイルは、共有ライブラリとして含まれています。
それ以外のディレクトリのライブラリを追加したい場合は、以下のいずれかの方法で設定する必要があります。OpenSSLのインストール
今回は例として、OpenSSLを共有ライブラリに追加するため、インストールをします。
参考:CentOS7にOpenSSL1.1.1をインストール
特定のユーザーのみが使えるようにする方法
LD_LIBRARY_PATHは、/etc/ld.so.confで定義されたパスよりも優先されます。
設定したいディレクトリ以下のライブラリを全て参照するようになります。
$ LD_LIBRARY_PATH=/usr/local/openssl-1.1.1/lib; export LD_LIBRARY_PATH設定したいディレクトリが複数ある場合は、
:で区切って設定します。$ LD_LIBRARY_PATH=/usr/local/lib:/usr/lib; export LD_LIBRARY_PATHちなみに、LD_LIBRARY_PATHの設定を以下で定義しても反映されません。
- $HOME/.profile
- /etc/profile
- /etc/environment
参考:EnvironmentVariables - Community Help Wiki
LD_LIBRARY_PATH についての説明から抜粋
Note: You can only set this environment variable inside an interactive shell. Since Ubuntu 9.04 Jaunty Jackalope, LD_LIBRARY_PATH cannot be set in $HOME/.profile, /etc/profile, nor /etc/environment files. You must use /etc/ld.so.conf.d/*.conf configuration files. See Launchpad bug #366728 for more information.参考:LD_LIBRARY_PATH を設定しても反映されないことがある
システム全体で永続的に使いたい場合
追加するライブラリ
今回は例として、以下のopensslのライブラリ群を追加します。
$ sudo ls -l /usr/local/openssl-1.1.1/lib total 10432 drwxr-xr-x 2 root root 39 Apr 17 04:12 engines-1.1 -rw-r--r-- 1 root root 5599274 Apr 17 04:12 libcrypto.a lrwxrwxrwx 1 root root 16 Apr 17 04:12 libcrypto.so -> libcrypto.so.1.1 -rwxr-xr-x 1 root root 3370584 Apr 17 04:12 libcrypto.so.1.1 -rw-r--r-- 1 root root 1019068 Apr 17 04:12 libssl.a lrwxrwxrwx 1 root root 13 Apr 17 04:12 libssl.so -> libssl.so.1.1 -rwxr-xr-x 1 root root 685240 Apr 17 04:12 libssl.so.1.1 drwxr-xr-x 2 root root 61 Apr 17 04:12 pkgconfig共有ライブラリとして認識されているパスの確認
以下コマンドで読み込まれているパスを確認できます。
$ sudo ldconfig -pライブラリ追加前の状態を確認します。ssl関係のライブラリは
/lib64のもののみ認識されています。$ sudo ldconfig -p | grep libssl libssl3.so (libc6,x86-64) => /lib64/libssl3.so libssl.so.10 (libc6,x86-64) => /lib64/libssl.so.10ライブラリを追加する
システム全体に永続的にライブラリを追加したい場合は、
/etc/ld.so.confに定義します。
実際にファイルの中を見てみると、以下のようになっています。$ sudo cat /etc/ld.so.conf include ld.so.conf.d/*.conf
/etc/ld.so.confで直接定義することもできますが、/etc/ld.so.conf.dの下にファイルを作成して定義することを推奨します。/etc/ld.so.conf.d/openssl-1.1.1.confを作成して、以下を定義します。
/etc/ld.so.conf.d/openssl-1.1.1.conf/usr/local/openssl-1.1.1/libキャッシュファイルを更新
OSはライブラリを検索する際に、/etc/ld.so.confを直接参照するのではなく、/etc/ld.so.cacheというキャッシュファイルを参照するため、以下のコマンドでこのキャッシュファイルを更新します。
$ sudo ldconfigライブラリが追加されたことを確認
以下コマンドで
/usr/local/openssl-1.1.1/lib以下のライブラリが追加されたことを確認できます。$ sudo ldconfig -p | grep libssl libssl3.so (libc6,x86-64) => /lib64/libssl3.so libssl.so.10 (libc6,x86-64) => /lib64/libssl.so.10 + libssl.so.1.1 (libc6,x86-64) => /usr/local/openssl-1.1.1/lib/libssl.so.1.1 + libssl.so (libc6,x86-64) => /usr/local/openssl-1.1.1/lib/libssl.so関連記事
参考
- 投稿日:2019-04-17T20:40:42+09:00
CentOS7にOpenSSL1.1.1をインストール
概要
Python3.7のインストール時に、OpenSSL1.0.2以上のインストールを求められたので1.1.1を入れた。
この記事ではその時の手順をまとめた。関連記事
OpenSSLの各versionのサポート状況
1.0.2は2019-12-31にEOL。
https://www.openssl.org/policies/releasestrat.htmlThe next version of OpenSSL will be 3.0.0.
Version 1.1.1 will be supported until 2023-09-11 (LTS).
Version 1.1.0 will be supported until 2019-09-11.
Version 1.0.2 will be supported until 2019-12-31 (LTS).
Version 1.0.1 is no longer supported.
Version 1.0.0 is no longer supported.
Version 0.9.8 is no longer supported.OpenSSLのインストール
依存関係のインストール
$ sudo yum install -y zlib-devel perl-core make gccOpenSSLのダウンロード
以下のサイトからインストールしたいバージョンをダウンロード。
https://www.openssl.org/source/ここでは1.1.1をインストールする。
$ sudo curl https://www.openssl.org/source/openssl-1.1.1.tar.gz -o /usr/local/src/openssl-1.1.1.tar.gzOpenSSLのインストール
$ cd /usr/local/src $ sudo tar xvzf openssl-1.1.1.tar.gz $ cd openssl-1.1.1/ $ sudo ./config --prefix=/usr/local/openssl-1.1.1 shared zlib $ sudo make depend $ sudo make $ sudo make test $ sudo make installインストールされたことを確認
以下にインストールされる。
$ sudo ls -l /usr/local/openssl-1.1.1 total 0 drwxr-xr-x 2 root root 37 Apr 17 05:57 bin drwxr-xr-x 3 root root 21 Apr 17 05:57 include drwxr-xr-x 4 root root 159 Apr 17 05:57 lib drwxr-xr-x 4 root root 28 Apr 17 05:58 share drwxr-xr-x 5 root root 140 Apr 17 05:57 sslOpenSSLを共有ライブラリに追加する
下記ページの、「システム全体で使いたい場合」以降を実施してください。
これを行わないとOpenSSLを利用できません。動作確認
以下コマンドで動作確認をする。TLSv1.3に対応していることがわかる。
$ sudo /usr/local/openssl-1.1.1/bin/openssl ciphers -v TLSv1.3 TLS_AES_256_GCM_SHA384 TLSv1.3 Kx=any Au=any Enc=AESGCM(256) Mac=AEAD TLS_CHACHA20_POLY1305_SHA256 TLSv1.3 Kx=any Au=any Enc=CHACHA20/POLY1305(256) Mac=AEAD TLS_AES_128_GCM_SHA256 TLSv1.3 Kx=any Au=any Enc=AESGCM(128) Mac=AEAD関連記事
参考
- 投稿日:2019-04-17T20:40:32+09:00
【Python2to3アップデート方法】Python3系のインストール
目次
概要
Python2系を3系にアップデートする手順や、バージョンについて説明する。
インストール方法
ここでは、以下の3つのインストール方法を紹介する。
方法 version 備考 CentOS:7.5にyumでインストール 3.6 yumでは3.6までしかインストールできない ubuntu:18.04にapt-getでインストール 3.7 apt-get-で3.7をインストール可能 ソースファイルをコンパイルしてインストール 3.7 - CentOS7にyumで3.6をインストール
CentOS7のyumでは、Python3.6が最新なので3.6をインストールする。
レポジトリを追加
$ sudo yum install -y https://centos7.iuscommunity.org/ius-release.rpmインストール
$ sudo yum install -y python36u python36u-libs python36u-devel python36u-pipインストールすると、python関連のコマンドが以下のように増える。
python3.6mとは、--with-pymallocオプションが設定されたもの。
pymallocについては、こちらを参照。/usr/bin/pydoc /usr/bin/python /usr/bin/python2.7 /usr/bin/python3.6-config /usr/bin/python3.6m-config /usr/bin/pyvenv-3.6 /usr/bin/pydoc3.6 /usr/bin/python2 /usr/bin/python3.6 /usr/bin/python3.6m /usr/bin/python3.6m-x86_64-configシンボリックリンクを貼る
pythonコマンドでpython3.6を実行できるようにする。
$ sudo ln -s /usr/bin/python3.6 /usr/local/bin/python $ python --version Python 3.6.7pipについて
python36u-pipをインストールした直後では、pipコマンドは
pip3.6のみが存在している。$ which pip3.6 /usr/bin/pip3.6pip3.6コマンドを実行すると、pipをupgradeしろと出るのでupgradeする。
You are using pip version 9.0.1, however version 19.0.3 is available. You should consider upgrading via the 'pip install --upgrade pip' command.$ pip3.6 install --upgrade pipそうすると、pipコマンドが以下の3つに増える。
-rwxr-xr-x 1 root root 218 Apr 18 01:54 /usr/bin/pip -rwxr-xr-x 1 root root 218 Apr 18 01:54 /usr/bin/pip3 -rwxr-xr-x 1 root root 218 Apr 18 01:54 /usr/bin/pip3.6ただし、全て同じ場所を参照しているようなので、全て同じだと思われる。
$ python3.6 -m pip -V pip 19.0.3 from /usr/lib/python3.6/site-packages/pip (python 3.6) $ pip -V pip 19.0.3 from /usr/lib/python3.6/site-packages/pip (python 3.6) $ pip3 -V pip 19.0.3 from /usr/lib/python3.6/site-packages/pip (python 3.6) $ pip3.6 -V pip 19.0.3 from /usr/lib/python3.6/site-packages/pip (python 3.6)python36とpython36uの違い
ちなみに、yum searchをすると分かるが、
python36とpython36uの2つのパッケージが用意されている。この2つの違いについて調べてみた。$ sudo yum search yum search python36 python36.x86_64 : Interpreter of the Python programming language python36u.x86_64 : Interpreter of the Python programming languageEPELの後発であるIUSが独自の基準で選んだpythonのリビジョンやらがEPELと違うので同じpackage nameだと不都合だからuをつけたんだろう
CentOS python3 package difference between python36 and python36u
python36u is an alternative build provided by IUS; python36 is an EPEL package.
yum info python36 python36u will show you different repos for the two, and it's likely that the IUS one has a slightly higher minor version number than the EPEL package.結論としては、提供元が違うだけで、大きな差はなさそう。
Ubuntuのapt-getで3.7をインストール
ちなみに、Ubuntuではあまり動作確認していません。
Python3.7のインストール
$ sudo apt-get install python3.7pip3のインストール
$ sudo apt-get install python3-pipソールファイルをコンパイルして3.7インストール
CentOS7.5でPython3.7をインストールするには、OpenSSL1.02以上が必要となる。
(Python3.6をインストールする場合は現行のversionでOK)現行もversionでPythonのインストールを続けると、コンパイル時に以下のように、ssl moduleをbuildできないというログが出力される。
Could not build the ssl module! Python requires an OpenSSL 1.0.2 or 1.1 compatible libssl with X509_VERIFY_PARAM_set1_host(). LibreSSL 2.6.4 and earlier do not provide the necessary APIs, https://github.com/libressl-portable/portable/issues/381現行のopensslのversionを調べてみると、1.0.2が入っているように見えるが、これでは駄目なようだ。
yum install -y openssl-develをしても結果は変わらなかった。$ rpm -qa | grep openssl openssl-libs-1.0.2k-8.el7.x86_64そのため、OpenSSL1.1.1をインストールすることにする。
OpenSSL-1.0.2は2019-12-31にEOL
また、1.0.2は2019-12-31にEOLなようなので、1.1.1を入れることにする。
https://www.openssl.org/policies/releasestrat.htmlThe next version of OpenSSL will be 3.0.0.
Version 1.1.1 will be supported until 2023-09-11 (LTS).
Version 1.1.0 will be supported until 2019-09-11.
Version 1.0.2 will be supported until 2019-12-31 (LTS).
Version 1.0.1 is no longer supported.
Version 1.0.0 is no longer supported.
Version 0.9.8 is no longer supported.OpenSSLのインストール
OpenSSL1.1.1を入れます。以下を参考にしてインストールしてください。
「OpenSSLを共有ライブラリに追加する」も実施してください。(実施しないとpipが使えません。)参考:CentOS7にOpenSSL1.1.1をインストール
ちなみに、既存のOpenSSLは残したまま、別途1.1.1をインストールするし、Pythonの./configureオプションで1.1.1のライブラリパスを指定するインストール方法を実施する。
依存関係のインストール
以下をインストールする。
$ sudo yum -y install zlib \ tk-devel \ tcl-devel \ ncurses-devel \ gdbm-devel \ readline-devel \ zlib-devel \ bzip2-devel \ sqlite-devel \ openssl-devel \ libXext.x86_64 \ libSM.x86_64 \ libXrender.x86_64 \ gcc \ gcc-c++ \ libffi-devel \ python-devel \ patch \ bzip2 \ makematplotlib使うなら下記もインストールする。
後から追加した場合、Pythonのリビルドが必要となる。$ sudo yum install -y tk.x86_64 tk-devel.x86_64 tkinter.x86_64Pythonのダウンロード
以下からインストールするversionを選ぶ。
https://www.python.org/ここでは3.7をインストールする。
$ sudo curl https://www.python.org/ftp/python/3.7.3/Python-3.7.3.tgz -o /usr/local/src/Python-3.7.3.tgzPythonのインストール
--with-openssl=/usr/local/openssl-1.1.1で先程インストールしたOpenSSLのパスを指定する。
--with-ensurepipを付けることでpip3もインストールする。
--enable-optimizationsを付けると、11%ほどパフォーマンスが上がるらしい。ただし、makeにすごく時間がかかる。$ cd /usr/local/src $ sudo tar xvfz Python-3.7.3.tgz $ cd Python-3.7.3 $ sudo ./configure --enable-unicode=ucs4 \ --prefix=/usr/local \ --with-openssl=/usr/local/openssl-1.1.1 \ --with-ensurepip \ --enable-optimizations $ sudo make $ sudo make altinstallmake altinstallについて
https://docs.python.org/ja/3/using/unix.html#building-python
警告 make install は python3 バイナリを上書きまたはリンクを破壊してしまうかもしれません。そのため、make install の代わりに exec_prefix/bin/pythonversion のみインストールする make altinstall が推奨されています。
インストールされたことを確認
以下にインストールされる。
$ sudo ls -l /usr/local/bin/ total 24644 -rwxr-xr-x 1 root root 101 Apr 17 11:22 2to3-3.7 -rwxr-xr-x 1 root root 241 Apr 17 11:22 easy_install-3.7 -rwxr-xr-x 1 root root 99 Apr 17 11:22 idle3.7 -rwxr-xr-x 1 root root 223 Apr 17 11:22 pip3.7 -rwxr-xr-x 1 root root 84 Apr 17 11:22 pydoc3.7 -rwxr-xr-x 2 root root 12603000 Apr 17 11:22 python3.7 -rwxr-xr-x 2 root root 12603000 Apr 17 11:22 python3.7m -rwxr-xr-x 1 root root 3105 Apr 17 11:22 python3.7m-config -rwxr-xr-x 1 root root 441 Apr 17 11:22 pyvenv-3.7参考
- 投稿日:2019-04-17T19:54:09+09:00
ライブラリ一覧とバージョンを確認する
はじめに
インストールしたライブラリとバージョンは次の方法で確認できる。
import pkg_resources for dist in pkg_resources.working_set: print(dist.project_name,dist.version)出力
zict 0.1.3 xlwt 1.3.0 xlwings 0.11.4 XlsxWriter 1.0.2 xlrd 1.1.0 wrapt 1.10.11 wincertstore 0.2 win-unicode-console 0.5 win-inet-pton 1.0.1 widgetsnbextension 3.0.2 wheel 0.29.0 Werkzeug 0.12.2 webencodings 0.5.1 wcwidth 0.1.7 urllib3 1.22 unicodecsv 0.14.1 typing 3.6.2 traitlets 4.3.2 tornado 4.5.2 toolz 0.8.2 Theano 1.0.1 testpath 0.3.1 tensorflow 1.1.0 tblib 1.3.2 tables 3.4.2 sympy 1.1.1 statsmodels 0.8.0 SQLAlchemy 1.1.13 spyder 3.2.4 sphinxcontrib-websupport 1.0.1 Sphinx 1.6.3 sortedcontainers 1.5.7 sortedcollections 0.5.3 snowballstemmer 1.2.1 six 1.11.0 singledispatch 3.4.0.3 simplegeneric 0.8.1 setuptools 36.5.0.post20170921 seaborn 0.8 scipy 0.19.1 scikit-learn 0.19.1 scikit-image 0.13.0 ruamel-yaml 0.11.14 rope 0.10.5 requests 2.18.4 requests-toolbelt 0.8.0 requests-oauthlib 0.8.0 QtPy 1.3.1 qtconsole 4.3.1 QtAwesome 0.4.4 pyzmq 16.0.2 PyYAML 3.12 pywin32 221 PyWavelets 0.5.2 pytz 2017.2 python-dateutil 2.6.1 pytest 3.2.1 PySocks 1.6.7 pyparsing 2.2.0 pyOpenSSL 17.2.0 pyodbc 4.0.17 pylint 1.7.4 Pygments 2.2.0 pyflakes 1.6.0 pycurl 7.43.0 pycrypto 2.6.1 pycparser 2.18 pycosat 0.6.3 pycodestyle 2.3.1 py 1.4.34 psutil 5.4.0 protobuf 3.5.1 prompt-toolkit 1.0.15 progress 1.3 ply 3.10 pkginfo 1.4.1 pip 9.0.1 Pillow 4.2.1 pickleshare 0.7.4 pep8 1.7.0 patsy 0.4.1 pathlib2 2.3.0 path.py 10.3.1 partd 0.3.8 pandocfilters 1.4.2 pandas 0.20.3 packaging 16.8 openpyxl 2.4.8 olefile 0.44 odo 0.5.1 oauthlib 2.0.6 numpydoc 0.7.0 numpy 1.12.1 numexpr 2.6.2 numba 0.35.0 notebook 5.0.0 nose 1.3.7 nltk 3.2.4 networkx 2.0 nbformat 4.4.0 nbconvert 5.3.1 navigator-updater 0.1.0 multipledispatch 0.4.9 msgpack-python 0.4.8 mpmath 0.19 mistune 0.7.4 menuinst 1.4.14 mccabe 0.6.1 matplotlib 2.1.0 MarkupSafe 1.0 lxml 4.1.0 lockfile 0.12.2 locket 0.2.0 llvmlite 0.20.0 lazy-object-proxy 1.3.1 Keras 2.0.5 jupyterlab 0.27.0 jupyterlab-launcher 0.4.0 jupyter-core 4.3.0 jupyter-console 5.2.0 jupyter-client 5.1.0 jsonschema 2.6.0 Jinja2 2.9.6 jedi 0.10.2 jdcal 1.3 itsdangerous 0.24 isort 4.2.15 ipywidgets 7.0.0 ipython 6.1.0 ipython-genutils 0.2.0 ipykernel 4.6.1 imagesize 0.7.1 imageio 2.2.0 idna 2.6 html5lib 0.999999999 heapdict 1.0.0 h5py 2.7.0 greenlet 0.4.12 glob2 0.5 gevent 1.2.2 flickrapi 2.3.1 Flask 0.12.2 Flask-Cors 3.0.3 filelock 2.0.12 fastcache 1.0.2 et-xmlfile 1.0.1 entrypoints 0.2.3 docutils 0.14 distributed 1.19.1 distlib 0.2.5 decorator 4.1.2 datashape 0.5.4 dask 0.15.3 cytoolz 0.8.2 Cython 0.26.1 cycler 0.10.0 cryptography 2.0.3 contextlib2 0.5.5 conda 4.6.12 conda-verify 2.0.0 conda-build 3.0.27 comtypes 1.1.2 colorama 0.3.9 clyent 1.2.2 cloudpickle 0.4.0 click 6.7 chardet 3.0.4 cffi 1.10.0 certifi 2017.7.27.1 CacheControl 0.12.3 Bottleneck 1.2.1 boto 2.48.0 bokeh 0.12.10 bleach 2.0.0 blaze 0.11.3 bkcharts 0.2 bitarray 0.8.1 beautifulsoup4 4.6.0 backports.shutil-get-terminal-size 1.0.0 astropy 2.0.2 astroid 1.5.3 asn1crypto 0.22.0 anaconda-project 0.8.0 anaconda-navigator 1.6.12 anaconda-client 1.6.5 alabaster 0.7.10 babel 2.5.0 deap 1.2.2参考文献
- 『データサイエンティスト養成読本 登竜門編』(2017)
- 投稿日:2019-04-17T19:24:00+09:00
Python 3.7.4 からGC対象オブジェクトのメモリ使用量が8バイト増えるかも
x86-64 の ABI では、 int128 や long double 型は 16byte 境界に配置することになっています。
しかし Python がもっている pymalloc 実装は 8 バイト境界のメモリブロックを返すようになっています。。。大丈夫か?
16byte alignment を要求する型が入った構造体を malloc しようとすると 16byte の倍数になるはずなので、malloc(sizoef(構造体)) ならセーフで、 malloc(sizeof(構造体)+16の倍数じゃないバイト数) みたいなケースでは問題になりそう。それよりも問題なのがGCヘッダ。64bit環境でのGCヘッダは 24byte です。「ヘッダ」という名前が示すとおり、GC対象オブジェクト(循環参照を構成するかもしれないオブジェクト。tuple,list,dictなど。)の先頭に配置されます。
GC対象オブジェクトを生成するときは、
malloc(sizeof(GCヘッダ) + オブジェクトサイズ)のようにメモリ確保してからGCヘッダ分ずらしたアドレスをPyObject*型のポインタに利用します。なので malloc が 16byte 境界アドレスを返しても、 +24byte したアドレスに Python オブジェクトが格納されることになり、そのオブジェクトの構造体に int128 や long double 型があると 16byte 境界をまたぐように配置されてしまいます。最近のコンパイラは実際に 16byte 境界を前提にした命令を利用するようになっているようで、「理論上は違反しているが実際は問題なく動いている」ではなく「本当にセグフォで落ちる」問題になってしまいました。
最近まで気づかなかったのですが、 Python 2.7 で先にこの現象が報告されていて、 2.7.15 でGCヘッダが 24byte から 32byte に増やされていました。 (changelog, commit, issue)
最近 Python 3.7 でも同様の問題が報告された (クラッシュのissue, 昔からあったubsanエラーのissue) ので、ABI互換を破壊しない他の良い方法が見つからない限りは同じ修正を適用するしかなさそうです。 long double とか int128 とかいったレアな型のために、大量にある&それらの型を絶対に入れることがないタプルのメモリ消費を+8バイトしないといけないのは、ケチな私からすると惜しいです。
ところで、Python 3.8 ではGCヘッダの中身を3ワード(64bit環境で24byte)から2ワード(同16byte)に削って、GC対象オブジェクトstr,bytes,int,floatなどは対象外)のメモリ使用量を8バイト削ることに成功していました。そのためこの問題の影響を受けることなく、余計なパディングは必要ありません。結果的に Python 2.7.15 以降や多分 3.7.4 以降に比べると16byteの削減になります。この改善に成功していて本当に良かった。
- 投稿日:2019-04-17T18:57:11+09:00
PNGからM5Stackで表示できるBitmapのテキストデータに変換するPythonツール
M5Stackを買いました!
どうやら人気らしくネットでの在庫がなくなっているようです。(2019.04現在)
何をしてよいのか分からなかったのですが、SDカードに入ったjpeg画像は簡単に表示できるということを知って、早速表示してみました。
ArduinoIDEはすでに入っていたので簡単なスケッチを書くだけです。void setup(void) { M5.begin(); M5.Lcd.drawJpgFile(SD, "/miku.jpg"); }
コードを書くよりも、16GB以下のマイクロSDカードを部屋で探す方が時間がかかりました(笑)次はM5.LCD.drawRGBBitmapを使って、ドット絵などの小さい画像を表示させます。
画像を切り替えてアニメーションさせるために、SDカードの画像ファイルではなくプログラム内に画像データとして置きます。
このときに画像をテキストデータに変換するのですが、適当なツールが見つけられなかったので、簡単なコンバータをPythonで作りました。
ソースコードはこちら。
https://github.com/iikagenlabo/png2imgpython png2img.py <pngfile>とすると、画面にテキストデータが表示されます。
コピペするかリダイレクトでファイルにしてコードに埋め込んでください。// 例 const unsigned short img0[] = { 0x0000,0x0000,0x0000,0x3800,0xD800,0xC800,0xC800,0xC800, 0xC800,0xC800,0xC800,0xC800,0xC800,0xC800,0xC800,0xC800, 0xC800,0xC800,0xC800,0xC800,0xC800,0xC800,0xC800,0xC800, 0xC800,0xC800,0xC800,0xC800,0xC800,0xC800,0xC800,0xC800, };



- 投稿日:2019-04-17T18:34:25+09:00
ROSでのpythonのプログラムからロボットのゴールを指定する。
はじめに
rosで目的地まで自律移動させる際に使っているrvizの「2D Nav Goal」をプログラム上から指定することを目的としています。個人的にpythonで処理をしてから目的地の決定をしたいと思ったのでpythonでやる方法を調査しました。
コード
以下ソースコードです。
sample.py#!/usr/bin/env python import rospy import actionlib import tf from nav_msgs.msg import Odometry import math from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal def goal_pose(pose): goal_pose = MoveBaseGoal() goal_pose.target_pose.header.frame_id = 'map' goal_pose.target_pose.pose.position.x = pose[0][0] goal_pose.target_pose.pose.position.y = pose[0][1] goal_pose.target_pose.pose.position.z = pose[0][2] goal_pose.target_pose.pose.orientation.x = pose[1][0] goal_pose.target_pose.pose.orientation.y = pose[1][1] goal_pose.target_pose.pose.orientation.z = pose[1][2] goal_pose.target_pose.pose.orientation.w = pose[1][3] return goal_pose if __name__ == '__main__': rospy.init_node('patrol') listener = tf.TransformListener() client = actionlib.SimpleActionClient('move_base', MoveBaseAction) client.wait_for_server() listener.waitForTransform("map", "base_link", rospy.Time(), rospy.Duration(4.0)) pose = [(-24.1430511475,-1.39947879314,0.0),(0.0,0.0,0.712479235583,0.701693194255)] goal = goal_pose(pose) client.send_goal(goal)参考
https://github.com/HotBlackRobotics/hotblackrobotics.github.io/blob/master/en/blog/_posts/2018-01-29-action-client-py.md
https://hotblackrobotics.github.io/en/blog/2018/01/29/action-client-py/
https://www.robotech-note.com/entry/2018/04/16/080816
- 投稿日:2019-04-17T18:34:15+09:00
ADALINEのまとめ
はじめに
ADALINE を一から実装したのでそのまとめ
ADALINE とパーセプトロンの違い
重みの更新方法
- パーセプトロンは単位ステップ関数で重みの更新を行います
- ADALINE は挿入力の高等関数を使う(Hidrow-Hoff 測と呼ばれます)
φ(w^Tx) = w^Tx
クラスラベルの予測
- パーセプトロンは活性化関数をそのまま出力します
- ADALINE は量子化器を使います
コスト関数の定義
教師あり学習を構成する要素として、最適化される
目的関数を定義することがあります。
多くの場合にはこの目的関数は最小化したいコスト関数です。ADALINE ではコスト関数$J(w)$として定義します。
ADALINE の場合計算結果と本当のクラスラベルとの誤差平方和をとります。J(w) = \frac{1}{2}\sum_i(y^{(i)}-φ(z^{(i)}))^2重みベクトル$w$の各重み$w_i$は同時に更新され以下の式で表されます。
w_i := w_i + \Delta w_i$\Delta w_i$の計算は以下のようにされます。
\Delta w_i = \eta(y_i - \breve{y_i})x_i^{(i)}$\eta$は学習率で$0<\eta<1$です。
$y_i$はトレーニングクラスラベルで$\breve{y_i}$は予測クラスラベルです。ADALINE の実装
実装環境
python 3.6
JupyterLab 0.35.4
コード
コスト関数の最小化については勾配降下法を使っています。
class AdalineGD(object): """ パラメータ eta:学習率 n_iter:トレーニング回数 属性 w_:一次元配列、適合後の重み errors_:リスト、各エポックでの誤分類数 """ def __init__(self,eta = 0.01,n_iter = 50): self.eta = eta self.n_iter = n_iter def fit(self,X,y): """ パラメータ X:配列のようなデータ構造,shape = {n_sample,n_features} n_samplesはサンプルの個数、n_featuresは特徴量の個数 y:目的変数 戻り値 self:object """ self.w_ = np.zeros(1 + X.shape[1]) self.cost_ = [] #トレーニング回数分トレーニングデータを反復 for i in range(self.n_iter): #活性化関数の出力の計算 output = self.net_input(X) #誤差の計算 errors = (y-output) #w1以降の更新 self.w_[1:] += self.eta*X.T.dot(errors) #w0の更新 self.w_[0] += self.eta*errors.sum() #コスト関数の計算(勾配降下法) cost = (errors**2).sum()/2.0 #コストの格納 self.cost_.append(cost) return self #挿入力の計算 def net_input(self,X): return np.dot(X,self.w_[1:])+self.w_[0] #活性化関数の出力を計算 def activation(self,X): return self.net_input(X) #1ステップ後のクラスラベルを返す def predict(self,X): return np.where(self.activation(X) >= 0.0,1,-1)学習するデータセットはパーセプトロンと同じアヤメのデータセットを使います
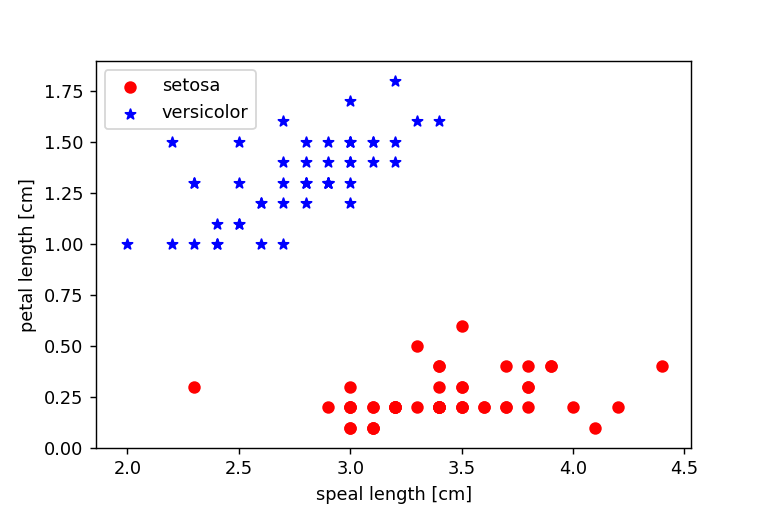
#Irisデータセットの入手 import pandas as pd df = pd.read_csv('https://archive.ics.uci.edu/ml/machine-learning-databases/iris/iris.data',header=None)散布図を描画します
#グラフの描画 import matplotlib.pyplot as plt #1-100番目まで目的変数の抽出 y = df.iloc[0:100,4].values #Iris-setosa を-1 iris-verginica を1に変換 y = np.where(y == 'Iris-setosa',-1,1) #1-100行目の1,3列めの抽出 X = df.iloc[0:100,[1,3]].values #グラフのプロット plt.scatter(X[:50,0],X[:50,1],color = 'red',marker = 'o',label = 'setosa') plt.scatter(X[50:100,0],X[50:100,1],color = 'blue',marker = '*',label='versicolor') #軸ラベルの設定 plt.xlabel('speal length [cm]') plt.ylabel('petal length [cm]') plt.show()
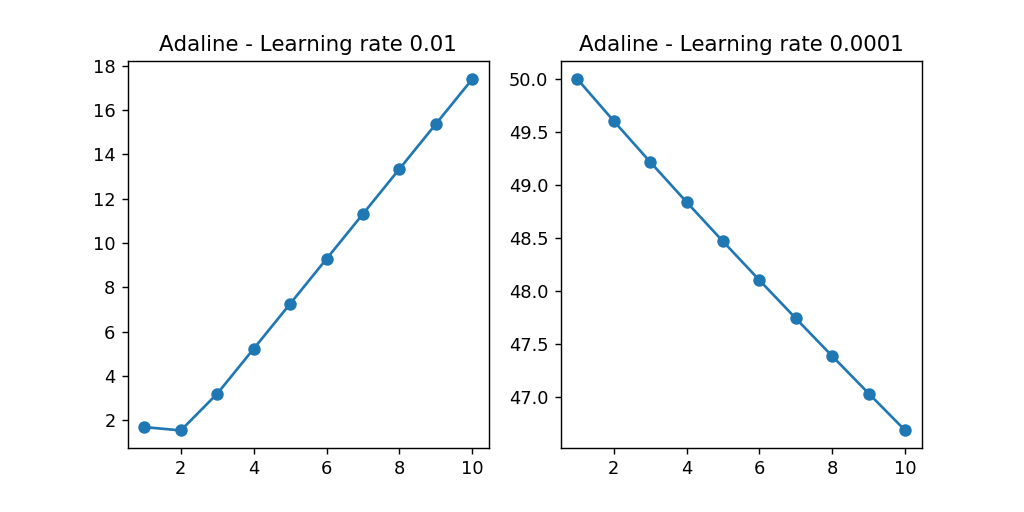
次に学習率$\eta$を 0.01 と 0.001 に設定してコスト関数とエポック数をプロットします
import matplotlib.pyplot as plt #描画領域を1行2列に変換 fig,ax = plt.subplots(nrows=1,ncols=2,figsize=(8,4)) #勾配降下法によるAdaLineGDの学習 ada1 = AdalineGD(n_iter=10,eta=0.01).fit(X,y) #エポック数とコストの関係を示す折れ線グラフのプロット ax[0].plot(range(1,len(ada1.cost_)+1),np.log10(ada1.cost_),marker='o') #軸ラベルの設定 ax[0].set_xlabel=('Epochs') ax[0].set_ylabel=('sum-squared-error') #タイトルの設定 ax[0].set_title('Adaline - Learning rate 0.01') #勾配降下法によるAdaLineGDの学習 ada2 = AdalineGD(n_iter=10,eta=0.0001).fit(X,y) #エポック数とコストの関係を示す折れ線グラフのプロット ax[1].plot(range(1,len(ada2.cost_)+1),ada2.cost_,marker='o') #軸ラベルの設定 ax[1].set_xlabel=('Epochs') ax[1].set_ylabel=('sum-squared-error') #タイトルの設定 ax[1].set_title('Adaline - Learning rate 0.0001') plt.show()
ここで得られたグラフから、右のグラフでは学習率が大きすぎると誤差平方和が増加していることがわかるった。
左のグラフでは、学習率が非常に小さいので収束させるのに相当な数のエポック数が必要になることがわかった。スケーリングをする
機械学習のアルゴリズムは、最適なパフォーマンスを実現するために何等かの特徴量スケーリングを必要とします。
今回は、標準化というスケーリング手法をとります。標準化は、各特徴量を 0 として標準偏差を 1 にするというものです。
例えば、$j$番目の特徴量を標準化するには、サンプルの平均$\mu_j$をすべてのトレーニングサンプルから引いて、標準偏差$\sigma_j$で割ります。x_j = \frac{x_j-\mu_j}{\sigma_j}この場合に$x_j$はすべてのトレーニングサンプルの$j$番目の特徴量の値からなるベクトルです。
numpyのmeanメソッドとstdメソッドを使うと簡単に実装できます。
meanメソッド 平均を計算する
stdメソッド 標準偏差を計算する
#データのコピー X_std = np.copy(X) #各列の標準化 X_std[:,0] = (X[:,0]-X[:,0].mean())/X[:,0].std() X_std[:,1] = (X[:,1]-X[:,1].mean())/X[:,1].std()標準化の後に、学習率$\eta = 0.01$を使ってトレーニングして収束することを確認します。
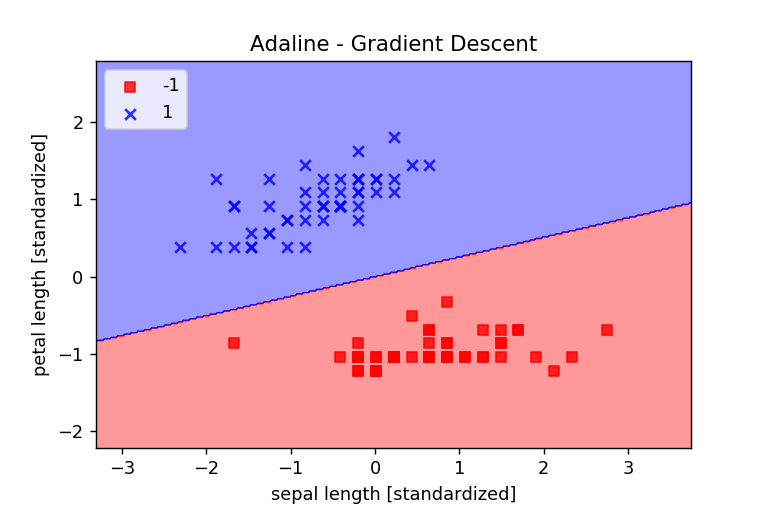
from matplotlib.colors import ListedColormap def plot_decision_regions(X,y,classifier,resolution = 0.02): #マーカーとカラーマップの用意 markers = ('s','x','o','^','v') colors = ('red','blue','lightgreen','gray','cyan') cmap = ListedColormap(colors[:len(np.unique(y))]) #決定領域のプロット x1_min,x1_max = X[:,0].min() - 1,X[:,0].max() + 1 x2_min,x2_max = X[:,1].min() - 1,X[:,1].max() + 1 #グリッドポイントの作成 xx1,xx2 = np.meshgrid(np.arange(x1_min,x1_max,resolution), np.arange(x2_min,x2_max,resolution)) #特徴量を一次元配列に変換して予測を実行する Z = classifier.predict(np.array([xx1.ravel(),xx2.ravel()]).T) #予測結果をグリッドポイントのデータサイズに変換 Z = Z.reshape(xx1.shape) #グリッドポイントの等高線のプロット plt.contourf(xx1,xx2,Z,alpha = 0.4,cmap = cmap) #軸の範囲の設定 plt.xlim(xx1.min(),xx1.max()) plt.ylim(xx2.min(),xx2.max()) #クラスごとにサンプルをプロット #matplotlibが1.5.0以下ならc = cmapをc=colors[idx]に変更 for idx,cl in enumerate(np.unique(y)): plt.scatter(x=X[y==cl,0],y=X[y == cl,1],alpha=0.8,c = cmap(idx),marker=markers[idx],label=cl)#勾配降下法によるADALINEの学習(標準化後) ada = AdalineGD(n_iter=15,eta=0.01) #モデルの適合 ada.fit(X_std,y) #境界領域のプロット plot_decision_regions(X_std,y,classifier=ada) #タイトルの設定 plt.title('Adaline - Gradient Descent') #軸ラベルの設定 plt.xlabel('sepal length [standardized]') plt.ylabel('petal length [standardized]') #凡例の設定 plt.legend(loc = 'upper left') # 保存先のファイル名(PNG形式) fname = "gradient.png" plt.savefig(fname, dpi = 128, tight_layout = True) plt.show() #エポック数とコストの関係性を示す折れ線グラフのプロット plt.plot(range(1,len(ada.cost_) + 1),ada.cost_,marker='o') #軸ラベルの設定 plt.xlabel('Epochs') plt.ylabel('Sum quared error') # 保存先のファイル名(PNG形式) fname = "sum_error.png" plt.savefig(fname, dpi = 128, tight_layout = True) plt.show()
グラフからわかったように、データの標準化をすることでADALINEが収束することが分かった。

- 投稿日:2019-04-17T17:59:52+09:00
蟻本をPythonで (初級編)
はじめに
蟻本(プログラミングコンテストチャレンジブック)は C++ で書かれているので、それを Python で書きました。詳しい解説は本に書いてあるため省略します。また、AtCoder 版!蟻本 (初級編)に載っている類題についても扱います。類題については先にこちらのリンク先で問題を見てから読むことを推奨します。
現在 2-2 までを載せています(少しずつ更新していきます)。2 初級編
2-1 すべての基本 "全探索"
スタックとキュー
Python では list 型の pop メソッドを使うことで以下のようにスタックとキューを扱うことができます。
# スタック s = [] s.append(1) # [1] s.append(2) # [1, 2] s.append(3) # [1, 2, 3] s.pop() # 一番上から取り除く [1, 2, 3] -> [1, 2] s.pop() # [1, 2] -> [1] s.pop() # [1] -> [] # キュー q = [] q.append(1) # [1] q.append(2) # [1, 2] q.append(3) # [1, 2, 3] q.pop(0) # 一番下から取り除く [1, 2, 3] -> [2, 3] q.pop(0) # [2, 3] -> [3] q.pop(0) # [3] -> []しかし、list 型だと要素を取り除く際に O(n) かかってしまいます。そこで、この操作を O(1) で行うことができる collections.deque を利用します。
スタック
from collections import deque s = deque([]) s.append(1) # [1] s.append(2) # [1, 2] s.append(3) # [1, 2, 3] s.pop() # 一番上から取り除く [1, 2, 3] -> [1, 2] s.pop() # [1, 2] -> [1] s.pop() # [1] -> []キュー
スタックと同様に collections.deque で扱うことができます。スタックでは取り除くときに pop だったのが、キューだと popleft になっているだけです。
from collections import deque q = deque([]) q.append(1) # [1] q.append(2) # [1, 2] q.append(3) # [1, 2, 3] q.popleft() # 一番下から取り除く [1, 2, 3] -> [2, 3] q.popleft() # [2, 3] -> [3] q.popleft() # [3] -> []例題 2-1-1 部分和問題
部分和問題
# i までで sum を作って、残り i 以降を調べる def dfs(i, sum): # n 個決め終わったら、今までの和 sum が k と等しいかを返す if i == n: return sum == k # a[i] を使わない場合 if dfs(i + 1, sum): return True # a[i] を使う場合 if dfs(i + 1, sum + a[i]): return True # a[i] を使う使わないに拘らず k が作れないので False を返す return False n, k = map(int, input().split()) a = list(map(int, input().split())) if dfs(0, 0): print("Yes") else: print("No")実はこの問題は再帰以外に bit で解くこともでき、以下のようになります。
n, k = map(int, input().split()) a = list(map(int, input().split())) # 0 から (2^n)-1 までループ for bit in range(1 << n): sum = 0 for i in range(n): # bit に i 番目のフラグが立っているかどうか if bit & (1 << i): # フラグが立っているならば sum に加算する sum += a[i] if sum == k: print("Yes") exit() print("No")bit 全探索についてはビット演算 (bit 演算) の使い方を総特集! 〜 マスクビットから bit DP まで 〜を参考にしました。
ABC 045 C たくさんの数式
・再帰
def dfs(i, f): if i == n - 1: return sum(list(map(int, f.split("+")))) # 式 f の末尾に "+" を追加するかしないかして次の数字を追加 return dfs(i + 1, f + s[i + 1]) + \ dfs(i + 1, f + "+" + s[i + 1]) s = input() n = len(s) print(dfs(0, s[0]))・bit
s = input() n = len(s) ans = 0 for bit in range(1 << (n - 1)): # 各場合で式 f を生成する f = s[0] for i in range(n - 1): if bit & (1 << i): # フラグが立っているならば "+" を式の末尾に追加する f += "+" f += s[i + 1] ans += sum(map(int, f.split("+"))) print(ans)ABC 079 C Train Ticket
ABC 045 C たくさんの数式とほぼ同じです。
・再帰
def dfs(i, f, sum): if i == 3: if sum == 7: # 答えは1つ出力すれば良いので =7 になれば終了 print(f + "=7") exit() else: # 式 f の末尾に符号と次の数字を追加し、その分 sum に加減する dfs(i + 1, f + "-" + s[i + 1], sum - int(s[i + 1])) dfs(i + 1, f + "+" + s[i + 1], sum + int(s[i + 1])) s = input() dfs(0, s[0], int(s[0]))・bit
s = input() for bit in range(1 << 3): ans = int(s[0]) f = s[0] for i in range(3): # フラグが立っていれば "+" 、なければ "-" if bit & (1 << i): ans += int(s[i + 1]) f += "+" else: ans -= int(s[i + 1]) f += "-" f += s[i + 1] if ans == 7: print(f + "=7") exit()ABC 104 C All Green
中途半端に解く配点は1種類以下で良いので、各配点について解くか解かないかを決め、その上で G 点に満たなければまだ解いてない配点のうち一番高い配点のものを足りない分解けば良いことになります。
・再帰
# まだ解いてない配点を nokori として持つ def dfs(i, sum, count, nokori): global ans if i == d: # G 点に満たなければ nokori のうち一番大きいものを解く if sum < g: use = max(nokori) # 解く問題が問題数を超えないように注意 n = min(pc[use - 1][0], -(-(g - sum) // (use * 100))) count += n sum += n * use * 100 if sum >= g: ans = min(ans, count) else: # 総合スコア、解いた問題数、まだ解いてない問題を更新 dfs(i + 1, sum, count, nokori) dfs(i + 1, sum + pc[i][0] * (i + 1) * 100 + pc[i][1], count + pc[i][0], nokori - {i + 1}) d, g = map(int, input().split()) pc = [list(map(int, input().split())) for i in range(d)] ans = float("inf") dfs(0, 0, 0, set(range(1, d + 1))) print(ans)・bit
d, g = map(int, input().split()) pc = [list(map(int, input().split())) for i in range(d)] ans = float("inf") for bit in range(1 << d): count = 0 sum = 0 nokori = set(range(1, d + 1)) for i in range(d): if bit & (1 << i): sum += pc[i][0] * (i + 1) * 100 + pc[i][1] count += pc[i][0] nokori.discard(i + 1) # G 点に満たなければ nokori のうち一番大きいものを解く if sum < g: use = max(nokori) n = min(pc[use - 1][0], -(-(g - sum) // (use * 100))) count += n sum += n * use * 100 if sum >= g: ans = min(ans, count) print(ans)ARC 029 A 高橋君とお肉
・再帰
def dfs(i, a, b): global ans if i == n: ans = min(ans, max(a, b)) else: # a の肉焼き器に乗せるか、 b の肉焼き器に乗せるか dfs(i + 1, a + t[i], b) dfs(i + 1, a, b + t[i]) n = int(input()) t = [int(input()) for i in range(n)] ans = float("inf") dfs(0, 0, 0) print(ans)・bit
n = int(input()) t = [int(input()) for i in range(n)] ans = float("inf") for bit in range(1 << n): a = 0 b = 0 for i in range(n): # フラグが立っていれば a に、なければ b に乗せる if bit & (1 << i): a += t[i] else: b += t[i] ans = min(ans, max(a, b)) print(ans)ABC 002 D 派閥
・再帰
import itertools # 形成した派閥を group として持つ def dfs(i, group): global ans if i == n: # group 内の全員が知り合い同士か flag = True # group 内から2人選ぶ組み合わせのループ for i in itertools.combinations(group, 2): # 1人でも知り合いでなければ終了 if friend[i[0]][i[1]] == 0: flag = False break if flag: ans = max(ans, len(group)) else: dfs(i + 1, group) dfs(i + 1, group + [i]) n, m = map(int, input().split()) friend = [[0] * n for i in range(n)] for i in range(m): x, y = map(int, input().split()) x -= 1 y -= 1 friend[x][y] = 1 friend[y][x] = 1 ans = 0 dfs(0, []) print(ans)・bit
import itertools n, m = map(int, input().split()) friend = [[0] * n for i in range(n)] for i in range(m): x, y = map(int, input().split()) x -= 1 y -= 1 friend[x][y] = 1 friend[y][x] = 1 ans = 0 for bit in range(1 << n): group = [] for i in range(n): if bit & (1 << i): group.append(i) # group 内の全員が知り合い同士か flag = True # group 内から2人選ぶ組み合わせのループ for i in itertools.combinations(group, 2): # 1人でも知り合いでなければ終了 if friend[i[0]][i[1]] == 0: flag = False break if flag: ans = max(ans, len(group)) print(ans)例題 2-1-1 Lake Counting (POJ No.2386)
Lake Counting (POJ No.2386)
# 現在位置 (x, y) def dfs(x, y): # 今いるところを . に置き換える field[x][y] = "." # 移動する8方向をループ for dx in range(-1, 2): for dy in range(-1, 2): # x, y 方向それぞれに dx, dy 移動した場所を (nx, ny) とする nx = x + dx ny = y + dy # nx と ny が庭の範囲内かどうかと field[nx][ny] が水溜りかどうかを判定 if 0 <= nx and nx < n and 0 <= ny and ny < m and field[nx][ny] == "W": dfs(nx, ny) n, m = map(int, input().split()) field = [list(input()) for i in range(n)] res = 0 for i in range(n): for j in range(m): if field[i][j] == "W": # Wが残っているならそこから dfs をはじめる dfs(i, j) res += 1 print(res)ATC 001 A 深さ優先探索
# pythonだとデフォルトの再帰処理回数の上限に引っかかってしまうので、それを変更 import sys sys.setrecursionlimit(1000000) def dfs(x, y): d[x][y] = 1 # 移動4方向をループ for i in range(4): nx = x + dx[i] ny = y + dy[i] # nx と ny が街の範囲内か、行ったことがないか、塀ではないかを判定 if 0 <= nx and nx < n and 0 <= ny and ny < m and d[nx][ny] == 0 and c[nx][ny] != "#": dfs(nx, ny) n, m = map(int, input().split()) c = [list(input()) for i in range(n)] # 到達したかどうか(0は未到達、1は到達済み) d = [[0] * m for i in range(n)] # 移動する4方向 dx = [1, 0, -1, 0] dy = [0, 1, 0, -1] # スタート地点から dfs を始める for i in range(n): for j in range(m): if c[i][j] == "s": dfs(i, j) # ゴール地点に到達したかどうか for i in range(n): for j in range(m): if c[i][j] == "g" and d[i][j]: print("Yes") exit() print("No")問題のページにも解説が載っていますが、蟻本の書き方を採用しました。
ARC 031 B 埋め立て
def dfs(x, y): field[x][y] = "x" # 移動4方向をループ for i in range(4): nx = x + dx[i] ny = y + dy[i] # nx と ny が地図の範囲内か、field[nx][ny]が島か判定 if 0 <= nx and nx < 10 and 0 <= ny and ny < 10 and field[nx][ny] == "o": dfs(nx, ny) A = [list(input()) for i in range(10)] # 移動する4方向 dx = [1, 0, -1, 0] dy = [0, 1, 0, -1] # 埋め立てる1マスを全探索 for p in range(10): for q in range(10): if A[p][q] == "x": # 海だったら A を field にコピーしてそのマスを埋め立てる field = [k[:] for k in A] field[p][q] = "o" count = 0 # 埋め立てた上で dfs で島の数をカウント for i in range(10): for j in range(10): if field[i][j] == "o": dfs(i, j) count += 1 # count (島の数)が1かどうか if count == 1: print("YES") exit() print("NO")ARC 037 B バウムテスト
def dfs(now, prev): global flag # 今いる頂点から行ける頂点を順に next に入れてループ for next in g[now]: if next != prev: if memo[next]: # 過去に訪れていれば閉路 flag = False else: memo[next] = True dfs(next, now) n, m = map(int, input().split()) g = [[] * n for i in range(n)] for i in range(m): u, v = map(int, input().split()) u -= 1 v -= 1 g[u].append(v) g[v].append(u) # 訪れたことがあるか memo = [False for i in range(n)] ans = 0 # 頂点をループ for i in range(n): if not memo[i]: flag = True dfs(i, -1) if flag: # 閉路がなければ木である ans += 1 print(ans)例題 2-1-3 迷路の最短路
迷路の最短路
from collections import deque # (sx, sy) から (gx, gy) への最短距離を求める # 辿り着けないと INF def bfs(): # すべての点を INF で初期化 d = [[float("inf")] * m for i in range(n)] # 移動4方向のベクトル dx = [1, 0, -1, 0] dy = [0, 1, 0, -1] for i in range(n): for j in range(m): # スタートとゴールの座標を探す if maze[i][j] == "S": sx = i sy = j if maze[i][j] == "G": gx = i gy = j # スタート地点をキューに入れ、その点の距離を0にする que = deque([]) que.append((sx, sy)) d[sx][sy] = 0 # キューが空になるまでループ while que: # キューの先頭を取り出す p = que.popleft() # 取り出してきた状態がゴールなら探索をやめる if p[0] == gx and p[1] == gy: break # 移動4方向をループ for i in range(4): # 移動した後の点を (nx, ny) とする nx = p[0] + dx[i] ny = p[1] + dy[i] # 移動が可能かの判定とすでに訪れたことがあるかの判定 # d[nx][ny] != INF なら訪れたことがある if 0 <= nx and nx < n and 0 <= ny and ny < m and \ maze[nx][ny] != "#" and d[nx][ny] == float("inf"): # 移動できるならキューに入れ、その点の距離を p からの距離 +1 で確定する que.append((nx, ny)) d[nx][ny] = d[p[0]][p[1]] + 1 return d[gx][gy] n, m = map(int, input().split()) maze = [list(input()) for i in range(n)] print(bfs())ABC 007 C 幅優先探索
蟻本の問題とほぼ全く同じですが、sx と sy 、gx と gy が逆なので注意が必要です。
from collections import deque def bfs(): d = [[float("inf")] * c for i in range(r)] dx = [1, 0, -1, 0] dy = [0, 1, 0, -1] que = deque([]) que.append((sy, sx)) d[sy][sx] = 0 while que: p = que.popleft() if p[0] == gy and p[1] == gx: break for i in range(4): nx = p[0] + dx[i] ny = p[1] + dy[i] if 0 <= nx and nx < r and 0 <= ny and ny < c and\ maze[nx][ny] != "#" and d[nx][ny] == float("inf"): que.append((nx, ny)) d[nx][ny] = d[p[0]][p[1]] + 1 return d[gy][gx] r, c = map(int, input().split()) sy, sx = map(int, input().split()) gy, gx = map(int, input().split()) sx -= 1 sy -= 1 gy -= 1 gx -= 1 maze = [list(input()) for i in range(r)] print(bfs())JOI 2010 予選 E チーズ
チーズを食べるたびにスタートとゴールが変わる問題です。
from collections import deque def bfs(sx, sy, gx, gy): d = [[float("inf")] * w for i in range(h)] dx = [1, 0, -1, 0] dy = [0, 1, 0, -1] que = deque([]) que.append((sx, sy)) d[sx][sy] = 0 while que: p = que.popleft() if p[0] == gx and p[1] == gy: break for i in range(4): nx = p[0] + dx[i] ny = p[1] + dy[i] if 0 <= nx and nx < h and 0 <= ny and ny < w and\ maze[nx][ny] != "X" and d[nx][ny] == float("inf"): que.append((nx, ny)) d[nx][ny] = d[p[0]][p[1]] + 1 return d[gx][gy] h, w, n = map(int, input().split()) maze = [list(input()) for i in range(h)] # 各チーズ工場の座標 g = [0] * n for i in range(h): for j in range(w): if maze[i][j] == "S": sx = i sy = j # 書かれているのが数字なら g にその座標を書き込む if maze[i][j].isdecimal(): g[int(maze[i][j]) - 1] = (i, j) # 1回目は巣をスタート、硬さ1のチーズ工場をゴールにする ans = bfs(sx, sy, g[0][0], g[0][1]) # それ以降は前回の工場をスタート、次の工場をゴールにする for i in range(1, n): ans += bfs(g[i - 1][0], g[i - 1][1], g[i][0], g[i][1]) print(ans)ABC 088 D Grid Repainting
最短経路のマス以外は塗ることができるため、白いマスの個数から最短経路のマス分とゴールのマスを引けば求められます。
from collections import deque def bfs(): d = [[float("inf")] * w for i in range(h)] dx = [1, 0, -1, 0] dy = [0, 1, 0, -1] que = deque([]) que.append((sx, sy)) d[sx][sy] = 0 while que: p = que.popleft() if p[0] == gx and p[1] == gy: break for i in range(4): nx = p[0] + dx[i] ny = p[1] + dy[i] if 0 <= nx and nx < h and 0 <= ny and ny < w and\ maze[nx][ny] != "#" and d[nx][ny] == float("inf"): que.append((nx, ny)) d[nx][ny] = d[p[0]][p[1]] + 1 return d[gx][gy] h, w = map(int, input().split()) maze = [list(input()) for i in range(h)] sx, sy = 0, 0 gx, gy = h - 1, w - 1 # 白いマスを数える white = 0 for i in range(h): for j in range(w): if maze[i][j] == ".": white += 1 res = bfs() if 0 < res < float("inf"): # 白いマスの数から最短経路でかかるコスト分を引く # ゴールを黒いマスに変えることはできないためその分も引く print(white - res - 1) else: print(-1)ARC 005 C 器物損壊!高橋君
壁を壊した回数も含めて考える必要があるため、今までの d[x][y] を d[x][y][t](t は壊した回数) として解きます。また、 Python だと BFS で解くと TLE になってしまうため、今回は DFS (deque の popleft を pop に変えただけです)を使いました。 BFS で解けた方いましたら教えていただけると嬉しいです。
from collections import deque def dfs(): d = [[[False] * 3 for j in range(w)] for i in range(h)] dx = [1, 0, -1, 0] dy = [0, 1, 0, -1] for i in range(h): for j in range(w): if maze[i][j] == "s": sx = i sy = j if maze[i][j] == "g": gx = i gy = j que = deque([]) # 3つ目は壊した回数 que.append((sx, sy, 0)) # 座標と壊した回数ごとに行ける行けないを持つ d[sx][sy][0] = True while que: # ここが popleft ではなく pop になっているためスタックになり、これはDFSです p = que.pop() if p[0] == gx and p[1] == gy: break for i in range(4): nx = p[0] + dx[i] ny = p[1] + dy[i] t = p[2] if not (0 <= nx and nx < h and 0 <= ny and ny < w): continue # すでに2回壊してる状態で壁に当たると進めない if t == 2 and maze[nx][ny] == "#": continue if d[nx][ny][t]: continue # 壁なら壊して進む if maze[nx][ny] == "#": que.append((nx, ny, t + 1)) d[nx][ny][t + 1] = True else: que.append((nx, ny, t)) d[nx][ny][t] = True # ゴールの座標を壊した回数でループ for i in range(3): if d[gx][gy][i]: return True h, w = map(int, input().split()) maze = [list(input()) for i in range(h)] if dfs(): print("YES") else: print("NO")例題 2-1-4 特殊な状態の列挙
特殊な状態の列挙
Python には順列や組み合わせを列挙することのできる itertools というライブラリがあります。
import itertools # 順列 # permutations(list, n) で list から n 個選んで並べる for i in itertools.permutations([0, 1, 2], 3): print(i) # (0, 1, 2) # (0, 2, 1) # (1, 0, 2) # (1, 2, 0) # (2, 0, 1) # (2, 1, 0) # 組み合わせ # combinations(list, n) で list から n 個選ぶ for i in itertools.combinations([0, 1, 2], 2): print(i) # (0, 1) # (0, 2) # (1, 2)ABC 054 C One-stroke Path
import itertools n, m = map(int, input().split()) path = [[False] * n for i in range(n)] for i in range(m): a, b = map(int, input().split()) a -= 1 b -= 1 path[a][b] = True path[b][a] = True ans = 0 # 頂点を並び替える順列を生成してループ for i in itertools.permutations(range(n), n): # 頂点1が始点 if i[0] == 0: # 生成した順列の中をさらにループ for j in range(n): # n - 1 まで続いたら条件を満たすパスが存在する if j == n - 1: ans += 1 break # i[j] から i[j + 1] に行くパスがなければ終了 if not path[i[j]][i[j + 1]]: break print(ans)JOI 2009 予選 D カード並べ
import itertools n = int(input()) k = int(input()) card = [input() for i in range(n)] # set を使うと重複せずに数えられる number = set() # card から k 個選んで並び替える for i in itertools.permutations(card, k): # 並び替えたものを繋げて1つの文字列にする number.add("".join(i)) print(len(number))2-2 猪突猛進! "貪欲法"
例題 2-2-1 硬貨の問題
硬貨の問題
c = list(map(int, input().split())) a = int(input()) # コインの金額 v = [1, 5, 10, 50, 100, 500] ans = 0 for i in range(1, 7): t = min(a // v[-i], c[-i]) # コイン i を使う枚数 a -= t * v[-i] ans += t print(ans)JOI 2007 予選 A おつり
「硬貨の問題」の各硬貨を十分にたくさん持っているバージョンです。
# おつりの金額 a = 1000 - int(input()) v = [1, 5, 10, 50, 100, 500] ans = 0 for i in range(1, 7): t = a // v[-i] a -= t * v[-i] ans += t print(ans)例題 2-2-2 区間スケジューリング問題
区間スケジューリング問題
# 多次元リストの sort に使える from operator import itemgetter n = int(input()) s = list(map(int, input().split())) t = list(map(int, input().split())) st = sorted([(s[i], t[i]) for i in range(n)], key=itemgetter(1)) ans = 0 # 最後に選んだ仕事の終了時間 last = 0 for i in range(n): if last < st[i][0]: ans += 1 last = st[i][1] print(ans)KUPC 2015 A 東京都
t = int(input()) for i in range(t): s = input() ans = 0 j = 0 while j < len(s) - 4: # 前から5文字ずつ見ていく if s[j:j + 5] == "tokyo" or s[j:j + 5] == "kyoto": ans += 1 # 一致すれば5文字分進める j += 5 else: j += 1 print(ans)ABC 103 D - Islands War
from operator import itemgetter n, m = map(int, input().split()) # 区間の終端でソート ab = sorted([tuple(map(int, input().split())) for i in range(m)], key=itemgetter(1)) # 前回除いた橋 removed = -1 ans = 0 for a, b in ab: # a が removed より大きい = まだ取り除いてない if a > removed: removed = b - 1 ans += 1 print(ans)ABC 038 D プレゼント
解けなくて調べてたら蟻本の中級編に載ってるデータ構造が必要だということがわかったので一旦飛ばします。
例題 2-2-3 Best Cow Line (POJ No.3617)
Best Cow Line (POJ No.3617)
n = int(input()) s = input() t = "" a = 0 b = n - 1 while a <= b: # 左から見た場合と右から見た場合を比較 left = False i = 0 while a + i <= b: if s[a + i] < s[b - i]: left = True break elif s[a + i] > s[b - i]: left = False break i += 1 if left: t += s[a] a += 1 else: t += s[b] b -= 1 print(t)ABC 076 C Dubious Document 2
sd = input() t = input() n = len(sd) m = len(t) s = [] # sd を後ろから見ていき、 t の入りそうな場所を探す for i in range(n - m, -1, -1): t_kamo = sd[i:i + m] for j in range(m + 1): # 1文字ずつ順に入りうるか調べ、最後まで入るなら "?" を "a" に置き換えて出力 if j == m: print((sd[:i] + t + sd[i + len(t):]).replace("?", "a")) exit() if t_kamo[j] == "?": continue elif t_kamo[j] != t[j]: break print("UNRESTORABLE")ABC 007 B 辞書式順序
辞書順最小は "a" なので、これを出力すれば良いです。
a = input() if a == "a": print(-1) else: print("a")ABC 009 C 辞書式順序ふたたび
from collections import Counter n, k = map(int, input().split()) s = list(input()) s_sort = sorted(s) t = "" # 元の位置と違う文字の数 diff = 0 # 見終わったけどまだ使ってない文字 counter = Counter(s[:1]) counts = sum(counter.values()) # 1文字目から順に見ていく for i in range(n): # t + c が可能か調べる for c in s_sort: # t + c の中で元の位置と違う文字の数 diff1 = diff + (c != s[i]) # まだ使ってない文字の中で元の位置と違う文字の数 diff2 = counts - (counter[c] > 0) # 両方を足して k 以下ならば t + c が可能 if diff1 + diff2 <= k: t += c s_sort.remove(c) diff = diff1 counter = Counter(s[:i + 2]) - Counter(t) counts = sum(counter.values()) break print(t)例題 2-2-4 Saruman's Army (POJ No.3069)
Saruman's Army (POJ No.3069)
n = int(input()) r = int(input()) x = list(map(int, input().split())) x = sorted(x) i = 0 ans = 0 while i < n: # s はカバーされていない一番左の点の位置 s = x[i] i += 1 # s から距離 r を超える点まで進む while i < n and x[i] <= s + r: i += 1 # p は新しく印を付ける点の位置 p = x[i - 1] # p から距離 r を超える点まで進む while i < n and x[i] <= p + r: i += 1 ans += 1 print(ans)ABC 083 C Multiple Gift
条件を満たすもののうち数列の長さが最大になるのは、 Ai+1 が Ai の2倍になるような数列です。
x, y = map(int, input().split()) ans = 0 while x <= y: x *= 2 ans += 1 print(ans)ARC 006 C 積み重ね
n = int(input()) w = [int(input()) for i in range(n)] ans = 0 # 積み重ねた山の一番上のダンボール top = [] for i in w: # 山を順番に見る for j in range(len(top) + 1): # 載せられる山がなければ新しい山を作る if j == len(top): ans += 1 top.append(i) # 載せられる山があればそこに載せる if top[j] >= i: top[j] = i break print(ans)ABC 005 C おいしいたこ焼きの売り方
t = int(input()) n = int(input()) a = list(map(int, input().split())) m = int(input()) b = list(map(int, input().split())) # 各たこ焼きが作られてから経過した時間 takoyaki = [] # 今いる客の数 kyaku = 0 # 100秒目までループ for i in range(101): # 客を待たせてはいけない if kyaku: print("no") exit() for j in range(n): # i 秒目にたこ焼きが作られていれば takoyaki に追加 if a[j] == i: takoyaki.append(0) for k in range(m): # i 秒目に客が来ていれば kyaku に加算 if b[k] == i: kyaku += 1 # 客とたこ焼きがある限り売る while takoyaki and kyaku: takoyaki.pop(0) kyaku -= 1 x = 0 while x < len(takoyaki): # 各たこ焼きに 1 秒加算する takoyaki[x] += 1 # t 秒を超えたら捨てる if takoyaki[x] > t: takoyaki.pop(x) else: x += 1 if kyaku: print("no") else: print("yes")例題 2-2-5 Fence Repair (POJ No.3253)
Fence Repair (POJ No.3253)
n = int(input()) L = list(map(int, input().split())) ans = 0 # 板が1本になるまで適用 while n > 1: # 一番短い板 mii1 、次に短い板 mii2 を求める mii1 = 0 mii2 = 1 if L[mii1] > L[mii2]: mii1, mii2 = mii2, mii1 for i in range(2, n): if L[i] < L[mii1]: mii2 = mii1 mii1 = i elif L[i] < L[mii2]: mii2 = i # それらを併合 t = L[mii1] + L[mii2] ans += t if mii1 == n - 1: mii1, mii2 = mii2, mii1 L[mii1] = t L[mii2] = L[n - 1] n -= 1 print(ans)
- 投稿日:2019-04-17T16:28:49+09:00
Djangoチュートリアル(個人用)その2:django.shortcuts
1. render(request, テンプレート, コンテキスト)
polls/views.pyfrom django.http import HttpResponse from django.template import loader def index(request): (中略) template = loader.get_template('polls/index.html') return HttpResponse(template.render(context, request))django.http.HttpResponse, django.template.loaderの代わりに、
django.shortcuts.renderを利用することでコンパクトに記述可能。polls/views.pyfrom django.shortcuts import render # ... def index(request): (中略) return render(request, 'polls/index.html', context)2. get_object_or_404(オブジェクト, pk)
polls/views.pyfrom django.http import Http404 from django.shortcuts import render from .models import Question # ... def detail(request, question_id): try: question = Question.objects.get(pk=question_id) except Question.DoesNotExist: raise Http404("Question does not exist") return render(request, 'polls/detail.html', {'question': question})django.http.Http404の代わりに、django.shortcuts.get_object_or_404をインポート。
try~except文を用いた分岐を用いなくても良いので、よりコンパクトな記述が可能となる。polls/views.pyfrom django.shortcuts import get_object_or_404, render from .models import Question # ... def detail(request, question_id): question = get_object_or_404(Question, pk=question_id) return render(request, 'polls/detail.html', {'question': question})ちなみに、
get_list_or_404()
という関数もあるそうです。
この関数は
get_object_or_404()
と同じように動きますが、
get() ではなく、 filter() を使います。
- 投稿日:2019-04-17T15:47:46+09:00
Djangoチュートリアル(個人用)その1
初投稿&個人用記事なのでショボいです…
Markdownなどの確認も兼ねて記事を作成しています。polls/template/polls/detail.html{{ text }}polls/views.pyfrom django.shortcuts import render def detail(request): test_text = "abc" render(request, "polls/index.html", {"text": test_text})
- 投稿日:2019-04-17T15:36:29+09:00
Talibで使えるローソク足に関する関数のまとめ (1)
最初に
今はまだβ版での随時更新していくのでよろしくお願いします
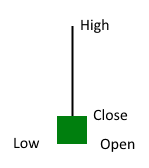
ローソク足について
ローソク足とは?
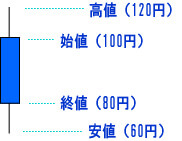
ローソク足とは日本のチャートの代表であり、ローソク足には日足、週足、月足、年足などの種類があります。
上に伸びている線を上ヒゲ。下に伸びている線を下ヒゲ。ヒゲの間にある箱を実体という。実体は始値と終値が一緒の時には存在しなく一本の線で表させれその線を同時線と呼ぶ。
「陰線」とは始値に対し終値が安い物。多くの書籍では黒いローソク足で書かれることが多い。
「陽線」とは始値に対して終値が高い物。多くの書籍では白いローソク足で書かれることが多い。
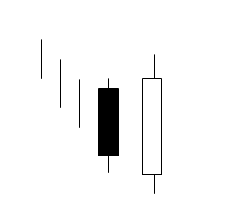
始値と終値が逆になっている事を注意して欲しい。短い足のローソク(小陽線・小陰線)
CDLSHORTLINE - Short Line Candle
【小陽線】
小陽線は、実体が小さく、値幅(高値と安値の価格差)も小さい陽線です。これは、レンジ相場でよく見られるもので、相場が上下どちらに動くか迷っていて、停滞状態にあることを表します。
しかし、停滞状態にある相場は、いつかブレイクします。
特に、小陽線が何本も続いた後に、相場が転換することは非常に多いです。例えば、小陽線が連続した後に大陽線が出た場合は、横ばい相場をブレイクした可能性を想定することができます。
参考サイト
参考サイト
【小陰線】
小陽線と同じように、横ばい相場の時に多く見られます。小陰線1本だけで、何か大きなシグナルになることはありません。前後のローソク足の連続性と比較して、次の動きに備えておくと良いでしょう。
参考サイト
参考サイト
integer = CDLSHORTLINE(open, high, low, close)
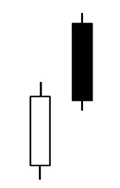
※小陰線や小陽線が連続している停滞状態の時こそ、無理に売買せず、戦略を立ててライバルに差をつけることが大切。長い足のローソク(大陽線・大陰線)
CDLLONGLINE - Long Line Candle
[買いのサイン]
実体が長く、価格が大きく変動するほど買いの勢いが強いのがわかります。大陽線は非常に強い買いのサインです。底値で大陽線が出た場合は、その後は株価の上昇が期待できます。
また、このローソクを大陽線と呼ぶ。
[売りのサイン]
実体が長く、価格が大きく変動するほど売りの勢いが強いのがわかります。大陰線は非常に強い売りのサインです。天井圏で大陰線が出た場合は、その後は株価の下落が予想できます。
また、このローソクを大陰線と呼ぶ。
integer = CDLLONGLINE(open, high, low, close)
丸坊主
CDLMARUBOZU - Marubozu
[買いのサイン]
黒丸坊主は片側にヒゲのない長い黒い実体です。それは弱気継続パターン、または強気逆転パターンであることが多く、特にダウントレンドに出現します。 長い黒色のろうそく足は強気の大勝利を示します。よってそれはしばしば, 強気特色の多くの逆転パターンの初日に出現します。
[売りのサイン]
白丸坊主は片側に影のない長い白い実体です。これは相場の勢いがひじょうに強いろうそくです。黒丸坊主と違い、しばしば継続の強気相場パターンか弱気逆転パターンで終わります。integer = CDLMARUBOZU(open, high, low, close)
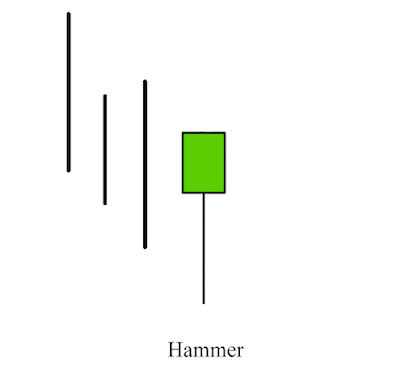
ハンマー
CDLHAMMER - Hammer
【買いのサイン】
下降トレンドで、ローソク足の終値が始値付近になるか、最高値で終了します。通常、このパターンには陽線(上ヒゲ)がありません。ただし、本体に比べてごく小さいときに限り、ヒゲがあってもかまいません。陽のハンマーが現れると、あるポイントで価格は低下するものの、売り手は価格をさらに押し広げることができず、反発して、終値は安値より上となりました。これは強気反転パターン(リバーサルパターン)です。
integer = CDLHAMMER(open, high, low, close)
参考サイト逆ハンマー
CDLINVERTEDHAMMER - Inverted Hammer
【買いのサイン】
逆ハンマーは通常、下降トレンドの終わりに観察されます。ろうそくの実体の上ヒゲにがあり、ろうそくの実体に下ヒゲが少しあるかな?程度です。このパターンはShooting Starに似ており、発生する位置が異なるだけです。
integer = CDLINVERTEDHAMMER(open, high, low, close)
参考サイトパターン
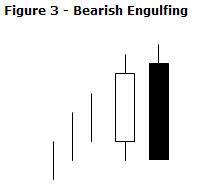
CDL2CROWS - Two Crows
【売りのサイン】
カブセ線として知られている
陽線の後に二本の陰線が出てくる二本目の陰線は長く大陽線の次に、その大陽線の終値よりも高く始まったものの、終値では大陽線の実体に入り込んでいる陰線。integer = CDL2CROWS(open, high, low, close)
CDL3BLACKCROWS - Three Black Crows
【売りのサイン】
三羽烏(黒三兵)そして知られている
三本の長い陰線のロウソク足が続き、二本目が前日のロウソク足の実体の幅で始まる。引きけにかけて前日の終値を下回り、三本目も二本メモ動揺な型のロウソク足を形成したもの。
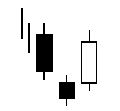
integer = CDL3BLACKCROWS(open, high, low, close)CDL3OUTSIDE - Three Outside Up/Down
【買いのサイン】
抱き線(抱きの一本立ち)として知られている
陰線が形成された後、二本目のロウソク足が陽線でかつ一本前の陰線の実体を飲み込む形になっている。
【売りのサイン】
最後の抱き線と知られている
陽線が形成された後、二本目のロウソク足が陰線でかつ一本前の陰線の実体を飲み込む形になっている。
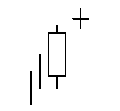
integer = CDL3OUTSIDE(open, high, low, close)CDL3STARSINSOUTH - Three Stars In The South
【買いのサイン】
1本目の陰線は下ヒゲが長く、実体も長い。また、二番目のロウソクは短く、黒の丸坊主、星で二番目のセッションに関連する
【売りのサイン】
高い終値の3つの白いろうそく足最初の2つのろうそく足 は長くなっています。
それぞれのろうそく足の始値は前の実体にかぶさっています。
integer = CDL3STARSINSOUTH(open, high, low, close)
CDL3WHITESOLDIERS - Three Advancing White Soldiers
【買いのサイン】
3つの長い白の ろうそく足が次々と現れ、それぞれの終値は前の終値より高くなっています。
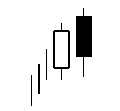
integer = CDL3WHITESOLDIERS(open, high, low, close)明けの明星
CDLABANDONEDBABY - Abandoned Baby
【買いのサイン】
一日目に陰線が出現した翌日、それより下に十字星、極性が現れる。その後、三本目のロウソク足はヒゲの間に同じ隙間のある「長い」陽線のろうそく足で、一番目より短くなっています。
【売りのサイン】
一日目に陽線が出現した翌日、それより上に十字星、極性が現れる。その後、三本目のロウソク足はヒゲの間に同じ隙間のある「長い」陰線のろうそく足で、一番目より短くなっています。
integer = CDLABANDONEDBABY(open, high, low, close, penetration=0)
CDLADVANCEBLOCK - Advance Block
【買いのサイン】
上昇トレンド内、もしくは下落トレンド内での反発を意味している。
また、陽線の実体はだんだんと短くなっていく。2番目と3番目のキャンドルの開きは、前のキャンドルの実体の中にあります。3つのキャンドルの上のヒゲは次第に高くなります
integer = CDLADVANCEBLOCK(open, high, low, close)
詳細CDLBELTHOLD - Belt-hold
【買いのサイン】
レンド方向に大差があるろうそく足のオープン
白ろうそく足(陽の大引け坊主)
白いろうそく足の実体は前のろうそく足の実体よりもずっと大きくなっています。
【売りのサイン】
レンド方向に大差があるろうそく足のオープン
黒ろうそく足 (陰の大引け坊主)
黒いろうそく足の実体は前のろうそく足の実体よりもずっと大きくなっています。
integer = CDLBELTHOLD(open, high, low, close)
CDLBREAKAWAY - Breakaway
【買いのサイン】
初日の大きい陰線は今の下落トレンド象徴して、次の日もまた陰線はトレンドの方向に実体の間隔がある。
【売りのサイン】
初日の大きい陽線は今の下落トレンド象徴して、次の日もまた陽線はトレンドの方向に実体の間隔がある。
integer = CDLBREAKAWAY(open, high, low, close)
CDLCLOSINGMARUBOZU - Closing Marubozu #talibにないと出るので飛ばす
【買いのサイン】
【】
integer = CDLCLOSINGMARUBOZU()(open, high, low, close)
関連記事CDLCONCEALBABYSWALL - Concealing Baby Swallow
【買いのサイン】
最初の二本の陰線は丸坊主。
三番目は二番目のろうそく足長さ範囲内で形作られます。それは長い上ヒゲを形成します。
四本目は陰線となり、抱き込む形になる。
integer = CDLCONCEALBABYSWALL(open, high, low, close)CDLCOUNTERATTACK - Counterattack
【買いのサイン】
最初は下落トレンドであり、最初のローソク足は陰線で実体が長い。
二本目のローソクは一本目のローソクと同じような大きさで終値が一本目のローソクの終値と近い陽線。今後上昇トレンドに変化する事がある。
【売りのサイン】
最初は上昇トレンドであり、最初のローソク足は陽線で実体が長い。
二本目のローソクは一本目のローソクと同じような大きさで終値が一本目のローソクの終値と近い陰線。今後下落トレンドに変化する事がある。
integer = CDLCOUNTERATTACK(open, high, low, close)
暗雲
CDLDARKCLOUDCOVER - Dark Cloud Cover
【売りのサイン】
どちらのろうそく足も長くなっています。
黒の ろうそく足の始値は白のろうそく足の高値を上回ります。
※ブルベアの三年間で1〜2回反応する程度
integer = CDLDARKCLOUDCOVER(open, high, low, close, penetration=0)
同時線
CDLDOJI - Doji
Doji(同時線)とは?
ろうそく足の実体が小さいため、始値と終値が同じであればそれは「同時線」と呼ばれます。
始値と終値の要求が全く同じであり、データに厳しい制約が設けられるので、同時線はほとんど見られません。
始値と終値の差が数個のティック(最小価格変動)を超えることがなければ、これは十分以上です。
integer = CDLDOJI(open, high, low, close)
詳細同時線(星)
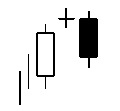
CDLDOJISTAR - Doji Star
【買いのサイン】
最初は長い陰線となり、二本目はトレンド方向のブレイクがある同時線が出る時。
【売りのサイン】
最初は長い陽線となり、二本目はトレンド方向のブレイクがある同時線が出る時。
integer = CDLDOJISTAR(open, high, low, close)
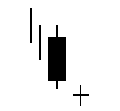
同時線(とんぼ)
CDLDRAGONFLYDOJI - Dragonfly Doji
上ヒゲのない十字線。高値圏に現れれば高値を買い上る勢いが衰えてきたこと、また、底値圏に現れれば押し戻す買い勢力を暗示します。
【買いのサイン】
低値圏(0 > x > -100 [x:自然数])
【売りのサイン】
高値圏(0 < x < 100 [x:自然数])
integer = CDLDRAGONFLYDOJI(open, high, low, close)
つつみ線
CDLENGULFING - Engulfing Pattern
【買いのサイン】
様々な陰線の黒色のローソクを飲み込んでいるネオンサインのように陽線の白色のローソクが存在している。
これは投資家の心が動いている様子がを凄く簡単に分かるようになっています。いくつかの単純な原因が強気な巻き込みパターンをより説得力のあるものにして、前の日のローソクが飲み込まれるほど、新しいトレンドシグナルはより効果的になります。
【売りのサイン】
弱気なつつみ線は、これからの低価格を示唆するテクニカルチャートのパターンです。パターンは、陽線のローソク足と、それに続いて小さい陽線のローソクを隠し、大きな陰線のローソク足で構成されています。これは、売り手が買い手を追い越し、買い手がそれを押し上げるよりも積極的に価格を引き下げている(ろうそくを上げている)ことを示しているので重要です。
integer = CDLENGULFING(open, high, low, close)
詳細CDLEVENINGDOJISTAR - Evening Doji Star
integer = CDLEVENINGDOJISTAR(open, high, low, close, penetration=0)
CDLEVENINGSTAR - Evening Star
【買いのサイン】
一番目と三番目のセッションは「長い」ろうそく足です。星のヒゲは短く、色は関係ありません。最初のろうそく足の終値から星は離れています。
三番目のろうそく足は一番目より短くその長さの内側に収まっています。
【売りのサイン】
一番目と三番目のセッションは「長い」ローソク足です。星のヒゲは短く、色は関係ありません。最初のろうそく足の終値から星は離れています。
三番目のろうそく足は一番目より短くその範囲に収まっています。
integer = CDLEVENINGSTAR(open, high, low, close,
penetration=0)
参考サイト長い足の同時線
CDLLONGLEGGEDDOJI - Long Legged Doji
この長い足がある同時線は強い上昇トレンドや強い下落トレンドで最も重要とされている。
理由は足の長い同時線は、需要と供給の力が均衡に近づいており、トレンドの逆転が起こる可能性があることを示唆しています。
integer = CDLLONGLEGGEDDOJI(open, high, low, close)CDLKICKING - Kicking
【買いのサイン】
最初に陰線の丸坊主が出てきてその後に陽線の丸坊主が下落トレンドで出てくる。
その時最初のローソクと次のローソクにはギャップアップがあり、ローソクが長ければ逆(今回の場合上昇トレンド)になる信憑性が高くなる。
※ギャップアップとは?【売りのサイン】
最初に陽線の丸坊主が出てきてその後に陰線の丸坊主が上昇トレンドで出てくる。
その時最初のローソクと次のローソクにはギャップダウンがあり、ローソクが長ければ逆(今回の場合下落トレンド)になる信憑性が高くなる。
※ギャップダウンとは?
integer = CDLKICKING(open, high, low, close)CDLLADDERBOTTOM - Ladder Bottom
【買いのサイン】
このパターンは上昇トレンドに反転する時のパターンの一つであり下落トレンド時にでる。
一本、二本、三本目そして四本目のローソクは陰線で長い実体、それぞれの初値と終値は前のローソクの初値と終値の間にある。
四本目の陰線は実体が短く上ヒゲがある。
五本目は前のローソク足の実体を始値が抜いている陽線。integer = CDLLADDERBOTTOM(open, high, low, close)
参考サイトCDLMATCHINGLOW - Matching Low
[買いのサイン]
下落トレンドであり、最初のローソク足は実体が長い陰線であり、二本目のローソクは最初のローソク足の終値がほぼ同じ終値の陰線。2番目のろうそくが1番目のろうそくの終値を下回ることができないということは、強気の逆転に対する支持レベルを生み出します。このパターンは、数期間にわたって価格が下落傾向にある時間帯ではなく、大規模な上昇トレンドに続く一時的な下落に最も適しています。
※[売りのサイン]にもなりうる
integer = CDLMATCHINGLOW(open, high, low, close)
参考サイトCDLMATHOLD - Mat Hold
[買いのサイン]
強気キッカーローソク足パターンを特定するには、以下の基準を探します。まず、最初のキャンドルは黒または弱気のローソク足である必要があります。次に、2番目のキャンドル(白または強気)が最初のキャンドルの終点より上に開いている必要があります。第三に、第二のろうそく足の形成中の価格の動きは、第一と第二のろうそくの間に形成されたギャップに決して落ちないはずです。ご想像のとおり、これは2番目のローソク足に一番下の芯があることはめったにないことを意味します。
Bullish Kickerローソク足パターンは、大幅な下落の後に形成する必要はありませんが、多くの場合そうなります。これが起こるとき、態度の突然の変化はたぶんゲームを変えるニュースイベントが原因です。
最後に、もしあなたが反対の形成(白いろうそくとそれに続く隙間に落ちない黒いろうそく)でパターンを見つけるなら、あなたはあなたの手に弱気キッカーがあるかもしれません。それはさらに下向きの動きを予告する弱気な反転信号です。強気のキッカーのように、弱気のキッカーはまれですが信頼できることを証明します
[売りのサイン]
integer = CDLMATHOLD(open, high, low, close,penetration=0)
流れ星(Shooting Star)
CDLSHOOTINGSTAR - Shooting Star
【売りのサイン】
上昇トレンドに見れる。上ヒゲは3以下ではなく実体より大きい。
下ヒゲはない、または非常に短い。(ろうそく足範囲の10%以上ではない。)
星と以前のろうそく足間の価格差
integer = CDLSHOOTINGSTAR(open, high, low, close)










- 投稿日:2019-04-17T15:13:10+09:00
MACでPythonのpsycopg2を使えるように
はじめに
MACのローカル環境でPythonを実行しようとしていました。
そのファイルではpsycopg2をimportしていたので、
homebrew等を使って準備をしていましたが、
いざ、実行しようとすると、下記エラーが。。File "sample.py", line 4, in <module> import psycopg2 File "/Users/gouda/.pyenv/versions/anaconda3-4.0.0/lib/python3.5/site-packages/psycopg2/__init__.py", line 50, in <module> from psycopg2._psycopg import ( # noqa ImportError: dlopen(/Users/gouda/.pyenv/versions/anaconda3-4.0.0/lib/python3.5/site-packages/psycopg2/_psycopg.cpython-35m-darwin.so, 2): Library not loaded: libssl.1.0.0.dylib Referenced from: /Users/gouda/.pyenv/versions/anaconda3-4.0.0/lib/python3.5/site-packages/psycopg2/_psycopg.cpython-35m-darwin.so Reason: image not found解決
こちらを参考に、対応しました。
libssl と libcrypto のバージョンが低いのが悪さしているようですね。
$ ln -s /usr/local/Cellar/openssl/1.0.2e/lib/libssl.1.0.0.dylib /usr/local/lib $ ln -s /usr/local/Cellar/openssl/1.0.2e/lib/libcrypto.1.0.0.dylib /usr/local/libこちらを実行することで、解決しました。
- 投稿日:2019-04-17T15:07:28+09:00
Arxiv API
今や論文公開プラットフォームの代名詞となったコーネル大学のarXivですが,APIはフリーで公開されています.
使い方についてはarXiv API User's Manualに全て書いてありますが,日本語での紹介が見当たらなかったので書き散らしてみます.基本
一般的なAPIと同じようにhttp://export.arxiv.org/api/queryにクエリーを付加する形となります.
parameters type defaults required search_query string None No id_list comma-delimited string None No start int 0 No max_results int 10 No search_queryで任意の単語を含む論文を検索します.
その際,前に修飾子をつけることで検索する範囲を指定できます.
prefix explanation ti Title au Author abs Abstract co Comment jr Journal Reference cat Subject Category rn Report Number id Id (use id_list instead) all All of the above ソート
- sortBy
- "relevance"
- "lastUpdatedDate"
- "submittedDate"
- sortOrder
- "ascending"
- "descending"
Category
CATに指定するキーワードです.
各キーワードが論文のカテゴリを表します.
キーワード 説明 astro-ph Astrophysics astro-ph.CO Cosmology and Nongalactic Astrophysics astro-ph.EP Earth and Planetary Astrophysics astro-ph.GA Astrophysics of Galaxies astro-ph.HE High Energy Astrophysical Phenomena astro-ph.IM Instrumentation and Methods for Astrophysics astro-ph.SR Solar and Stellar Astrophysics cond-mat.dis-nn Disordered Systems and Neural Networks cond-mat.mes-hall Mesoscale and Nanoscale Physics cond-mat.mtrl-sci Materials Science cond-mat.other Other Condensed Matter cond-mat.quant-gas Quantum Gases cond-mat.soft Soft Condensed Matter cond-mat.stat-mech Statistical Mechanics cond-mat.str-el Strongly Correlated Electrons cond-mat.supr-con Superconductivity cs.AI Artificial Intelligence cs.AR Hardware Architecture cs.CC Computational Complexity cs.CE Computational Engineering, Finance, and Science cs.CG Computational Geometry cs.CL Computation and Language cs.CR Cryptography and Security cs.CV Computer Vision and Pattern Recognition cs.CY Computers and Society cs.DB Databases cs.DC Distributed, Parallel, and Cluster Computing cs.DL Digital Libraries cs.DM Discrete Mathematics cs.DS Data Structures and Algorithms cs.ET Emerging Technologies cs.FL Formal Languages and Automata Theory cs.GL General Literature cs.GR Graphics cs.GT Computer Science and Game Theory cs.HC Human-Computer Interaction cs.IR Information Retrieval cs.IT Information Theory cs.LG Learning cs.LO Logic in Computer Science cs.MA Multiagent Systems cs.MM Multimedia cs.MS Mathematical Software cs.NA Numerical Analysis cs.NE Neural and Evolutionary Computing cs.NI Networking and Internet Architecture cs.OH Other Computer Science cs.OS Operating Systems cs.PF Performance cs.PL Programming Languages cs.RO Robotics cs.SC Symbolic Computation cs.SD Sound cs.SE Software Engineering cs.SI Social and Information Networks cs.SY Systems and Control econ.EM Econometrics eess.AS Audio and Speech Processing eess.IV Image and Video Processing eess.SP Signal Processing gr-qc General Relativity and Quantum Cosmology hep-ex High Energy Physics - Experiment hep-lat High Energy Physics - Lattice hep-ph High Energy Physics - Phenomenology hep-th High Energy Physics - Theory math.AC Commutative Algebra math.AG Algebraic Geometry math.AP Analysis of PDEs math.AT Algebraic Topology math.CA Classical Analysis and ODEs math.CO Combinatorics math.CT Category Theory math.CV Complex Variables math.DG Differential Geometry math.DS Dynamical Systems math.FA Functional Analysis math.GM General Mathematics math.GN General Topology math.GR Group Theory math.GT Geometric Topology math.HO History and Overview math.IT Information Theory math.KT K-Theory and Homology math.LO Logic math.MG Metric Geometry math.MP Mathematical Physics math.NA Numerical Analysis math.NT Number Theory math.OA Operator Algebras math.OC Optimization and Control math.PR Probability math.QA Quantum Algebra math.RA Rings and Algebras math.RT Representation Theory math.SG Symplectic Geometry math.SP Spectral Theory math.ST Statistics Theory math-ph Mathematical Physics nlin.AO Adaptation and Self-Organizing Systems nlin.CD Chaotic Dynamics nlin.CG Cellular Automata and Lattice Gases nlin.PS Pattern Formation and Solitons nlin.SI Exactly Solvable and Integrable Systems nucl-ex Nuclear Experiment nucl-th Nuclear Theory physics.acc-ph Accelerator Physics physics.ao-ph Atmospheric and Oceanic Physics physics.app-ph Applied Physics physics.atm-clus Atomic and Molecular Clusters physics.atom-ph Atomic Physics physics.bio-ph Biological Physics physics.chem-ph Chemical Physics physics.class-ph Classical Physics physics.comp-ph Computational Physics physics.data-an Data Analysis, Statistics and Probability physics.ed-ph Physics Education physics.flu-dyn Fluid Dynamics physics.gen-ph General Physics physics.geo-ph Geophysics physics.hist-ph History and Philosophy of Physics physics.ins-det Instrumentation and Detectors physics.med-ph Medical Physics physics.optics Optics physics.plasm-ph Plasma Physics physics.pop-ph Popular Physics physics.soc-ph Physics and Society physics.space-ph Space Physics q-bio.BM Biomolecules q-bio.CB Cell Behavior q-bio.GN Genomics q-bio.MN Molecular Networks q-bio.NC Neurons and Cognition q-bio.OT Other Quantitative Biology q-bio.PE Populations and Evolution q-bio.QM Quantitative Methods q-bio.SC Subcellular Processes q-bio.TO Tissues and Organs q-fin.CP Computational Finance q-fin.EC Economics q-fin.GN General Finance q-fin.MF Mathematical Finance q-fin.PM Portfolio Management q-fin.PR Pricing of Securities q-fin.RM Risk Management q-fin.ST Statistical Finance q-fin.TR Trading and Market Microstructure quant-ph Quantum Physics stat.AP Applications stat.CO Computation stat.ME Methodology stat.ML Machine Learning stat.OT Other Statistics stat.TH Statistics Theory
- 投稿日:2019-04-17T14:55:29+09:00
機械学習用の画像集めに便利な「google-images-download」の使い方
google-images-downloadの使い方
Google画像検索から画像をダウンロードするツール
Google検索から画像を一括でダウンロード出来る。
画像認識のモデルに学習させる時に便利。参考にしたページ
Googleから画像を一括でダウンロードするツール「google-images-download」 | cupOF Interestsインストール方法
pip install google_images_downloadpipでインストールする。
使い方
コマンドラインから簡単にダウンロード出来る。
googleimagesdownload --keywords "リンゴ"カレントディレクトリに「リンゴ」の検索結果を100件保存。
オプション一覧
オプション ショートカット 説明 keywords k ターゲットとなる画像のキーワード suffix_keywords sk キーワードを追加する為の接尾辞
('りんご' '赤' など)limit l 一度にダウンロードする画像数
(デフォルトでは100個)format f ダウンロードする画像の形式
(jpg, gif, png, bmp, svg, webp, ico)color co ダウンロードする画像の色を指定
(red, orange, yellow, green, teal,blue,purple,pink, white, gray, black, brown)color_type ct ダウンロードする画像色のタイプ
(full-color, black-and-white, transparent)size s ダウンロードする画像のサイズ
(large, medium, icon, >400*300, >640*480,>800*600,>1024*768, >2MP, >4MP, >6MP, >8MP, >10MP)aspect_ratio a ダウンロードする画像の形。パノラマなど
(tall, square, wide, panoramic)type t ダウンロードする画像のタイプ。パノラマなど
(face, photo, clip-art, line-drawing,animated)time w インデックスされた画像の期間を指定 1日以内, 一週間以内など
( past-24-hours, past-7-days)similar_images si 指定した画像ファイルやURLから、似たイメージをダウンロードします output_directory o 指定したディレクトリに画像を展開。
デフォルトではコマンドを実行したディレクトリに画像がダウンロードされますlanguage la 画像を入手するGoogleサービスの言語を指定 指定できる言語一覧
Arabic, Chinese (Simplified), Chinese (Traditional), Czech, Danish, Dutch, English, Estonian. Finnish, French, German, Greek, Hebrew, Hungarian,Icelandic, Italian, Japanese, Korean, Latvianm, Lithuanian, Norwegian, Portuguese, Polish, Romanian, Russian, Spanish, Swedish, Turkishchromedriver cd 画像を入手するドライバをchromedriverに変更できます。 100件以上のダウンロードには「ChromeDriver」が必要
デフォルトで設定されている100件以上の画像をダウンロードするには「chromeDriver」が必要。
下記URLからダウンロード。
Downloads - ChromeDriver - WebDriver for Chrome解凍して出てきた「chromedriver.exe」をカレントに置く。
googleimagesdownload -ri -cd "chromedriver.exe" -l 1000 -k "猫"こんな感じで叩けば出来るっぽい。
- 投稿日:2019-04-17T13:29:21+09:00
pyenv installでコケる(zlib)
pyenvでpythonのバージョンを上げたい
$ pyenv install 3.x.x // ここで止まる $ pyenv global 3.x.xエラー
$ pyenv install 3.x.x python-build: use openssl from homebrew python-build: use readline from homebrew <...> BUILD FAILED (OS X 10.14.3 using python-build 20180424) Inspect or clean up the working tree at /var/folders/82/wbj2z1dx1px5tgqszjg3fdt80000gn/T/python-build.20190417125321.77862 Results logged to /var/folders/82/wbj2z1dx1px5tgqszjg3fdt80000gn/T/python-build.20190417125321.77862.log Last 10 log lines: File "/private/var/folders/82/wbj2z1dx1px5tgqszjg3fdt80000gn/T/python-build.20190417125321.77862/Python-3.5.1/Lib/ensurepip/__main__.py", line 4, in <module> ensurepip._main() File "/private/var/folders/82/wbj2z1dx1px5tgqszjg3fdt80000gn/T/python-build.20190417125321.77862/Python-3.5.1/Lib/ensurepip/__init__.py", line 209, in _main default_pip=args.default_pip, File "/private/var/folders/82/wbj2z1dx1px5tgqszjg3fdt80000gn/T/python-build.20190417125321.77862/Python-3.5.1/Lib/ensurepip/__init__.py", line 116, in bootstrap _run_pip(args + [p[0] for p in _PROJECTS], additional_paths) File "/private/var/folders/82/wbj2z1dx1px5tgqszjg3fdt80000gn/T/python-build.20190417125321.77862/Python-3.5.1/Lib/ensurepip/__init__.py", line 40, in _run_pip import pip zipimport.ZipImportError: can't decompress data; zlib not available ? zlibを入れればええんか? make: *** [install] Error 1これで解決しました
$ brew install zlib $ brew install sqlite $ export LDFLAGS="${LDFLAGS} -L/usr/local/opt/zlib/lib" $ export CPPFLAGS="${CPPFLAGS} -I/usr/local/opt/zlib/include" $ export LDFLAGS="${LDFLAGS} -L/usr/local/opt/sqlite/lib" $ export CPPFLAGS="${CPPFLAGS} -I/usr/local/opt/sqlite/include" $ export PKG_CONFIG_PATH="${PKG_CONFIG_PATH} /usr/local/opt/zlib/lib/pkgconfig" $ export PKG_CONFIG_PATH="${PKG_CONFIG_PATH} /usr/local/opt/sqlite/lib/pkgconfig" $ pyenv install 3.6.8参考: https://github.com/jiansoung/issues-list/issues/13#issuecomment-470275744
他に試したこと
$ sudo installer -pkg /Library/Developer/CommandLineTools/Packages/macOS_SDK_headers_for_macOS_10.14.pkg -target /-> 同様にfailed
$ brew install zlib-> zlibだけ入れても意味がなかった
- 投稿日:2019-04-17T12:10:27+09:00
pythonでpsycopg2のインストールでエラー出た時の対処法のメモ
pip install django-heroku
を実行した時に
Command "python setup.py egg_info" failed with error code 1
のエラーが出てインストールされない時
brew install postgresql
して
export PATH="/usr/pgsql-9.4/bin:$PATH"するといける。
- 投稿日:2019-04-17T11:47:05+09:00
【秒速】PythonのPelicanを使ってウェブサイト(Coreserverで)を作ってみる。
Pelicanとは
Python製の静的サイトジェネレータです。Ruby製のJekyllやOctropressに似ていますが、PelicanはPythonだけで動かせます。GitHub Pagesへの公開も非常に簡単です。
公式サイトがとても充実していますが日本語の資料少ない。
Python製 Pelican を使ってサクッとブログを公開する より前まで自分のウェブサイトをワードプレスで使ったりしていましたが、テック系の記事はQittaに書きますし、ブログはnote、つぶやきはtwitterとそれぞれの役割が分担してきたので定期的にコンテンツを自分で書くウェブサイトはいらないのかなと考えていました。
ただ、自分のホームページはほしいので自己紹介を含めた簡単まとめとしてペリカンで軽くサイトを作ることにしました。
Pythonだし、退屈なことはあとあと自動化しようかと思ってます。
早速サイトを作る!
まず、この記事を使ってCoreserverで体験用ドメインとpythonのセットアップを終えてください。
https://qiita.com/twinoze/items/5bd62a2bc08fee7596f1
次にpipでpelicanとmarkdownします。
$ pip install pelican markdownサイトを入れるフォルダをどこでもいいので作ってから、そこに入りpelican quick-startを実行します。
初期設定用の質問に答えれば、簡単なデモサイトが出来上がります。$ mkdir mysite $ cd mysite
output内にhtmlファイルがいくつか作られるのですが、これをpublil_htmlに入れることで自分のウェブサイトを公開することができると思います。
毎回、場所を変えるのは面倒なので、viでpelicanconf.pyの最後の行に
OUTPUT_PATH = '../public_html/atomscott.com/'
をくっつけるとpublic_html直下のatomscott.comフォルダにサイトをoutputしてくれます。
atomscott.comにお邪魔してみると(いまは開発を進めたのでもっとかっこいいサイトが出てくるかもしれません!)こんな画面が!
楽ですね〜
今日はこれで以上です。
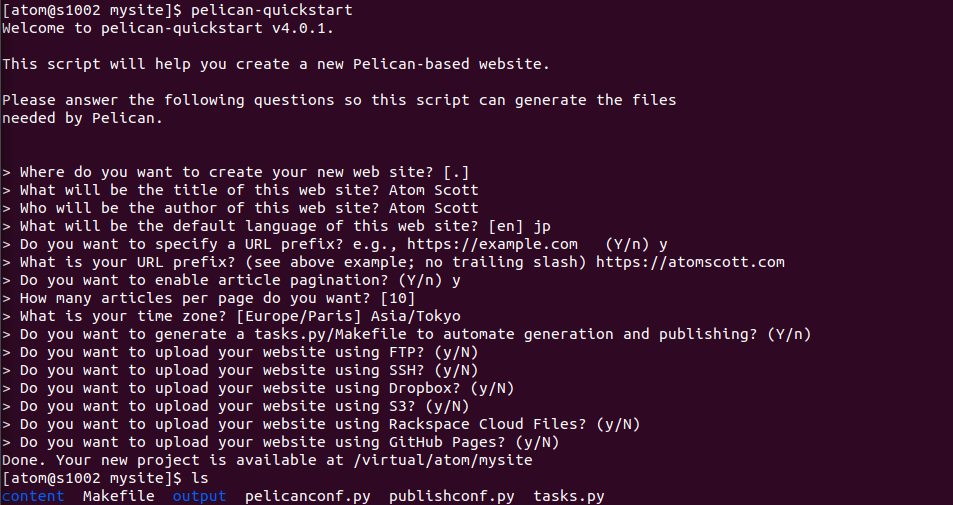
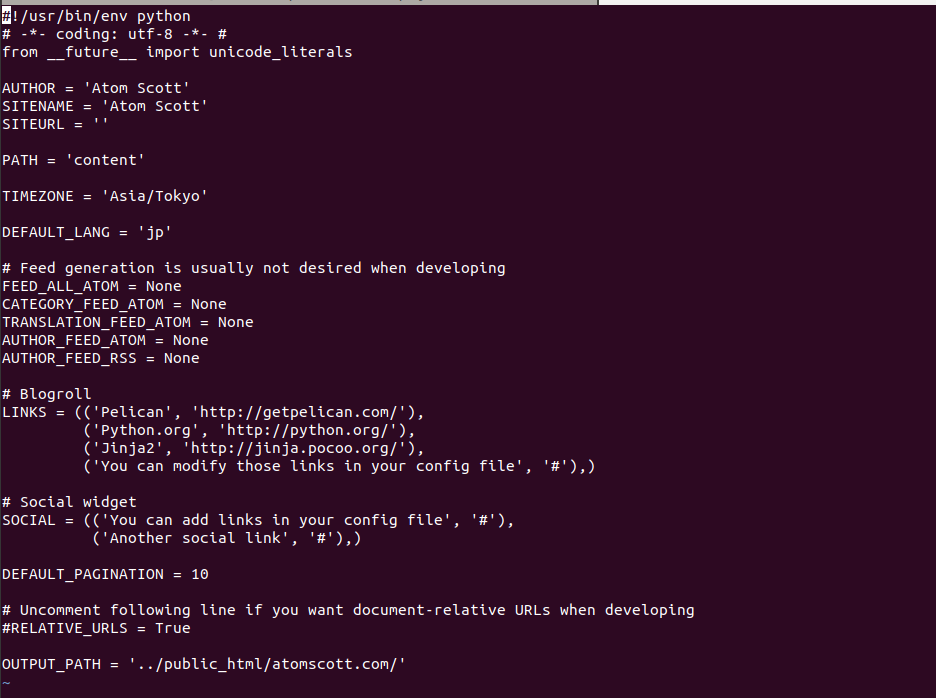
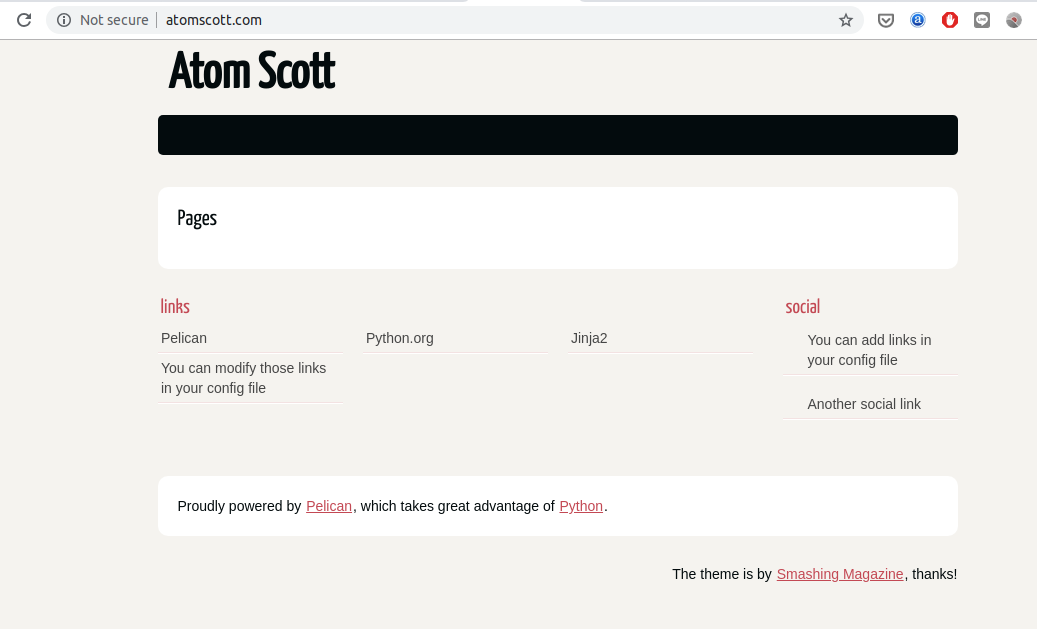
- 投稿日:2019-04-17T11:31:16+09:00
Docker-Composeでコンテナをビルドする際に起こったエラーと解決策まとめ
はじめましての方ははじめまして。
未来電子テクノロジーでインターンをしている<@kento_o>です。
今回は、Quickstart: Compose and Djangoを一通り試してみる中で起こったエラーと解決策をログとして残しておきます。
起こったエラー
・Dockerファイルを誤植した際に起こったエラー
・データベースにコネクトし、ページを表示する際に起こったエラー
1つ目のエラーは至極単純なものですが、2つ目が厄介でした。Disarrowed?
このようなエラーが出力されました。
んん?hostが許されていない......?
1時間ほどエラー原因を探してみたところ、どうも「Setting.py」の設定ミスのよう。setting.pyALLOWED_HOSTS = []となっていたので、
setting.pyALLOWED_HOSTS = ['*']に変更
解決
やりました,b
- 投稿日:2019-04-17T08:43:29+09:00
keras-self-attentionを使ってエンティティタイプを予測
keras-self-attention1 は、self-attentionを簡単に使うためのライブラリです。今回は、このライブラリを使うことによって、エンティティタイプ予測の問題をより汎用的な特徴量から学習させられることを確かめます。
事前準備
pip install keras-self-attentionモデル
訓練部分のコード
import json import sqlite3 from random import choice import numpy as np import sentencepiece as spm from keras import optimizers from keras.callbacks import ModelCheckpoint from keras.layers import Dense, Input, Embedding, Dropout, concatenate, Flatten from keras.models import Model from keras.preprocessing.sequence import pad_sequences from keras_self_attention import SeqSelfAttention sp = spm.SentencePieceProcessor() sp.load("./spmodel/en.wiki.bpe.vs10000.model") def build_model(num_labels, maxlen1=128, maxlen2=128, max_features=10001, dim1=50, dim2=50): inputs = Input(shape=(maxlen1, )) inputs2 = Input(shape=(maxlen2, )) emb1 = Embedding(max_features, dim1, input_length=maxlen1)(inputs) emb2 = Embedding(max_features, dim2, input_length=maxlen2)(inputs2) tmp = concatenate([emb1, emb2]) att = SeqSelfAttention(attention_activation='sigmoid')(tmp) tmp2 = Flatten()(emb1) tmp3 = Flatten()(att) tmp = concatenate([tmp2, tmp3]) tmp = Dense(1024, activation="linear")(tmp) out = Dropout(0.5)(tmp) output = Dense(units=num_labels, activation='softmax')(out) model = Model([inputs, inputs2], output) opt = optimizers.Adam(lr=0.001, clipvalue=0.5) model.compile(loss='categorical_crossentropy', optimizer=opt, metrics=['acc']) return model def preprocessing(texts, sp=sp, maxlen=50): return pad_sequences([sp.EncodeAsIds(text) for text in texts], maxlen=maxlen) def generate_data(data, labels, batch_size=1000): X0 = [] X1 = [] y = [] while True: for i, d in enumerate(data): X0.append(d["entity"].replace("_", " ")) X1.append(d["definition"]) label = np.zeros(len(labels.keys())) label[int(labels[d["type"]])] = 1.0 y.append(label) if len(X0) > 1000: yield [preprocessing(X0, maxlen=128), preprocessing(X1, maxlen=128)], np.array(y) X0 = [] X1 = [] y = [] def generate_test_data(test, labels): X0 = [] X1 = [] y = [] for i, d in enumerate(test): X0.append(d["entity"].replace("_", " ")) X1.append(d["definition"]) y.append(int(labels[d["type"]])) return [preprocessing(X0, maxlen=128), preprocessing(X1, maxlen=128)], np.array(y) if __name__ == "__main__": from sklearn.utils import shuffle from sklearn.metrics import classification_report with open("./labels.json") as f: key2i = json.load(f)[1] with open("./wiki_definition.json") as f: data = shuffle(json.load(f)) size = int(len(data) * 0.8) train, test = data[:size], data[size:] size = int(len(test) * 0.8) test, val = test[:size], test[size:] model = build_model(len(key2i.keys())) callbacks = [ ModelCheckpoint("model.h5", save_best_only=False, monitor="val_loss", mode="min"), ModelCheckpoint("model_best.h5", save_best_only=True, monitor="val_loss", mode="min") ] model.fit_generator(generate_data(train, key2i), validation_data=generate_data(val, key2i), validation_steps=10, steps_per_epoch=1000, epochs=3, verbose=1, callbacks=callbacks) X_test, y_test = generate_test_data(test, key2i) y_pred = [np.argmax(x) for x in model.predict(X_test)] with open("eval.txt", "w") as f: f.write(classification_report(y_test, y_pred))Note: labels.jsonには、ラベル名とラベルIDの対応が入っています。
Note: wiki_definition.jsonには、定義文、エンティティ名, エンティティタイプが格納されています。
精度
※ スマホなど、ブラウザの横幅が狭い場合は、以下の精度を横にスクロールさせて見てください。
precision recall f1-score support AcademicConference 0.71 0.33 0.45 15 AcademicJournal 0.92 0.95 0.94 1075 Actor 0.49 0.16 0.24 630 AdministrativeRegion 0.84 0.81 0.82 3307 AdultActor 0.76 0.61 0.68 171 Aircraft 0.92 0.96 0.94 1726 Airline 0.96 0.95 0.96 582 Airport 0.97 0.94 0.96 2177 Album 0.96 0.96 0.96 19501 AmateurBoxer 0.29 0.08 0.12 75 Ambassador 0.28 0.36 0.31 83 AmericanFootballLeague 0.00 0.00 0.00 10 AmericanFootballPlayer 0.80 0.90 0.85 3070 AmericanFootballTeam 0.00 0.00 0.00 5 Amphibian 0.91 0.95 0.93 563 AmusementParkAttraction 0.76 0.55 0.64 64 AnatomicalStructure 0.56 0.64 0.60 268 Animal 0.73 0.83 0.77 1096 AnimangaCharacter 0.50 0.05 0.08 22 Anime 0.41 0.10 0.16 161 Arachnid 0.94 0.84 0.89 632 Archaea 0.71 0.56 0.63 27 Architect 0.58 0.34 0.43 457 ArchitecturalStructure 0.33 0.05 0.08 43 Artery 1.00 0.83 0.91 52 ArtificialSatellite 0.89 0.94 0.91 371 Artist 0.47 0.38 0.42 2267 ArtistDiscography 0.98 0.99 0.98 560 Artwork 0.82 0.81 0.82 760 Asteroid 0.00 0.00 0.00 2 Astronaut 0.77 0.79 0.78 104 Athlete 0.81 0.86 0.84 5763 AustralianFootballLeague 0.00 0.00 0.00 1 AustralianFootballTeam 0.72 0.88 0.79 72 AustralianRulesFootballPlayer 0.98 0.99 0.98 1959 AutoRacingLeague 0.00 0.00 0.00 1 Automobile 0.92 0.86 0.89 887 AutomobileEngine 0.87 0.76 0.81 54 Award 0.82 0.93 0.87 788 Bacteria 0.45 0.37 0.41 145 BadmintonPlayer 0.96 0.88 0.92 241 Band 0.86 0.79 0.83 5259 Bank 0.72 0.41 0.52 425 Baronet 0.68 0.81 0.74 118 BaseballLeague 0.58 0.88 0.70 48 BaseballPlayer 0.96 0.98 0.97 3303 BaseballSeason 0.96 0.42 0.58 53 BaseballTeam 0.00 0.00 0.00 2 BasketballLeague 0.88 0.62 0.73 69 BasketballPlayer 0.92 0.94 0.93 1930 BasketballTeam 0.87 0.82 0.85 271 Bay 0.00 0.00 0.00 1 BeachVolleyballPlayer 0.55 0.43 0.48 28 BeautyQueen 0.87 0.76 0.81 339 Beverage 0.79 0.56 0.66 130 BiologicalDatabase 0.66 0.67 0.67 46 Bird 0.98 0.92 0.95 2012 BodyOfWater 0.68 0.45 0.54 195 Bodybuilder 0.90 0.43 0.58 44 Bone 0.65 0.47 0.55 55 Book 0.85 0.90 0.87 5439 Boxer 0.85 0.86 0.85 642 Brain 0.78 0.77 0.77 82 Brewery 0.18 0.07 0.10 43 Bridge 0.85 0.92 0.88 694 BroadcastNetwork 0.34 0.28 0.31 197 Building 0.67 0.78 0.72 7466 BusCompany 0.87 0.74 0.80 223 BusinessPerson 0.00 0.00 0.00 109 CanadianFootballLeague 0.00 0.00 0.00 1 CanadianFootballTeam 0.56 0.29 0.38 31 Canal 0.84 0.65 0.73 63 Canoeist 0.90 0.89 0.89 70 Cardinal 0.57 0.35 0.43 117 Castle 0.60 0.72 0.65 232 Cave 0.87 0.67 0.76 89 Chancellor 0.00 0.00 0.00 16 Cheese 0.73 0.71 0.72 42 Chef 0.61 0.50 0.55 90 ChemicalCompound 0.86 0.90 0.88 1550 ChessPlayer 0.85 0.80 0.82 226 ChristianBishop 0.75 0.77 0.76 1413 City 0.70 0.76 0.73 3115 ClassicalMusicArtist 0.00 0.00 0.00 60 ClassicalMusicComposition 0.55 0.36 0.44 99 Cleric 0.71 0.48 0.57 414 ClubMoss 0.00 0.00 0.00 17 College 0.86 0.86 0.86 14 CollegeCoach 0.83 0.82 0.83 1053 Colour 0.75 0.63 0.69 38 Comedian 0.49 0.23 0.32 194 ComedyGroup 0.00 0.00 0.00 7 Comic 0.75 0.79 0.77 344 ComicStrip 0.88 0.46 0.61 65 ComicsCharacter 0.89 0.84 0.87 620 ComicsCreator 0.71 0.55 0.62 426 Company 0.76 0.84 0.80 7920 ConcentrationCamp 0.33 0.08 0.13 12 Congressman 0.42 0.47 0.45 493 Conifer 0.86 0.75 0.80 110 Constellation 0.90 0.60 0.72 15 Continent 0.00 0.00 0.00 5 Convention 0.58 0.59 0.59 327 Country 0.70 0.52 0.60 475 Crater 0.91 0.81 0.86 103 CricketGround 0.90 0.70 0.79 37 CricketLeague 0.00 0.00 0.00 1 CricketTeam 0.91 0.83 0.87 113 Cricketer 0.97 0.97 0.97 2926 Criminal 0.66 0.40 0.50 380 Crustacean 0.87 0.83 0.85 433 CultivatedVariety 0.97 0.91 0.94 242 Curler 0.90 0.93 0.91 137 Currency 0.92 0.77 0.84 57 Cycad 0.83 0.54 0.65 28 CyclingRace 0.85 0.94 0.89 115 CyclingTeam 0.97 0.74 0.84 47 Cyclist 0.94 0.96 0.95 1745 Dam 0.91 0.86 0.89 516 DartsPlayer 0.97 0.86 0.91 101 Device 0.91 0.83 0.87 196 Diocese 0.98 0.97 0.97 526 Disease 0.95 0.82 0.88 882 Drug 0.88 0.79 0.84 936 Earthquake 0.99 0.98 0.98 129 Economist 0.46 0.20 0.28 188 EducationalInstitution 0.84 0.41 0.55 75 Election 1.00 0.71 0.83 17 Embryology 0.39 0.30 0.34 30 Engineer 0.46 0.21 0.29 115 Entomologist 0.56 0.26 0.36 73 Enzyme 0.96 0.96 0.96 786 EthnicGroup 0.87 0.79 0.83 773 Eukaryote 0.62 0.42 0.50 208 EurovisionSongContestEntry 0.84 0.86 0.85 179 Event 0.75 0.69 0.72 655 Fashion 0.33 0.02 0.04 50 FashionDesigner 0.66 0.35 0.46 130 Fern 0.82 0.80 0.81 165 FictionalCharacter 0.77 0.46 0.57 640 FieldHockeyLeague 0.00 0.00 0.00 5 FigureSkater 0.97 0.94 0.95 528 Film 0.92 0.93 0.93 16836 FilmFestival 0.91 0.86 0.88 143 Fish 0.95 0.93 0.94 2870 FloweringPlant 0.00 0.00 0.00 26 Food 0.89 0.85 0.87 744 FootballLeagueSeason 0.93 0.96 0.95 1501 FootballMatch 0.96 0.89 0.92 486 FormulaOneRacer 0.69 0.47 0.56 120 FormulaOneTeam 0.92 0.58 0.71 19 Fungus 0.94 0.96 0.95 1742 GaelicGamesPlayer 0.95 0.96 0.96 568 Galaxy 0.94 0.95 0.95 157 Game 0.82 0.67 0.74 228 Garden 0.81 0.42 0.55 50 Ginkgo 0.00 0.00 0.00 2 GivenName 0.90 0.90 0.90 621 Glacier 0.92 0.83 0.87 119 Gnetophytes 0.00 0.00 0.00 3 GolfCourse 0.86 0.74 0.80 50 GolfLeague 0.00 0.00 0.00 3 GolfPlayer 0.97 0.94 0.96 538 GolfTournament 0.93 0.97 0.95 269 GovernmentAgency 0.72 0.78 0.75 879 Governor 0.43 0.18 0.26 420 GrandPrix 0.97 0.98 0.98 229 Grape 0.93 0.83 0.88 69 GreenAlga 0.48 0.75 0.58 67 GridironFootballPlayer 0.69 0.45 0.54 1090 Guitarist 0.00 0.00 0.00 23 Gymnast 0.91 0.80 0.85 333 HandballLeague 0.00 0.00 0.00 3 HandballPlayer 0.94 0.96 0.95 366 HandballTeam 0.90 0.78 0.84 60 Historian 0.40 0.03 0.06 124 HistoricBuilding 0.79 0.81 0.80 1373 HistoricPlace 0.66 0.42 0.51 3697 HockeyTeam 0.93 0.90 0.92 374 Holiday 0.75 0.59 0.66 152 HollywoodCartoon 0.82 0.83 0.83 241 HorseRace 0.97 0.98 0.98 378 HorseRider 0.76 0.69 0.72 87 HorseTrainer 0.83 0.39 0.54 38 Hospital 0.84 0.90 0.87 474 Hotel 0.68 0.49 0.57 196 IceHockeyLeague 0.77 0.82 0.79 44 IceHockeyPlayer 0.95 0.97 0.96 2344 InformationAppliance 0.80 0.45 0.57 200 InlineHockeyLeague 0.00 0.00 0.00 1 Insect 0.98 0.99 0.98 21033 Island 0.76 0.81 0.78 929 Jockey 0.73 0.74 0.73 91 Journalist 0.30 0.12 0.17 230 Judge 0.52 0.30 0.38 430 LacrosseLeague 1.00 0.50 0.67 8 LacrossePlayer 0.77 0.84 0.81 69 Lake 0.91 0.90 0.91 1516 Language 0.97 0.94 0.95 1191 LaunchPad 1.00 0.86 0.92 14 LawFirm 0.87 0.49 0.62 68 Legislature 0.79 0.85 0.82 287 Library 0.65 0.82 0.73 158 Ligament 0.96 0.79 0.87 29 Lighthouse 0.95 0.87 0.91 287 Locomotive 0.87 0.95 0.91 515 Lymph 0.83 1.00 0.91 10 Magazine 0.90 0.67 0.77 809 Mammal 0.89 0.89 0.89 1260 Manga 0.73 0.55 0.63 491 MartialArtist 0.92 0.70 0.79 513 Mayor 0.42 0.41 0.41 266 Medician 0.17 0.01 0.02 76 MemberOfParliament 0.52 0.61 0.56 1191 MilitaryConflict 0.92 0.92 0.92 2103 MilitaryPerson 0.84 0.79 0.81 4300 MilitaryStructure 0.64 0.52 0.57 665 MilitaryUnit 0.94 0.93 0.94 2694 Mineral 0.94 0.93 0.93 224 MixedMartialArtsEvent 0.95 0.91 0.93 116 Model 0.62 0.46 0.53 252 Mollusca 0.98 0.98 0.98 4271 Monarch 0.49 0.36 0.42 367 Monument 0.56 0.22 0.32 86 Moss 0.85 0.64 0.73 78 Motorcycle 0.84 0.86 0.85 153 MotorcycleRacingLeague 0.00 0.00 0.00 4 MotorcycleRider 0.86 0.93 0.89 201 MotorsportSeason 0.94 0.93 0.94 503 Mountain 0.91 0.88 0.89 2631 MountainPass 0.93 0.88 0.90 160 MountainRange 0.91 0.78 0.84 385 Murderer 0.00 0.00 0.00 17 Muscle 0.92 0.77 0.84 44 Museum 0.83 0.68 0.75 874 MusicFestival 0.73 0.34 0.47 64 MusicGenre 0.83 0.49 0.62 172 Musical 0.76 0.83 0.79 209 MusicalArtist 0.70 0.73 0.71 7874 MusicalWork 0.50 0.14 0.22 43 MythologicalFigure 0.73 0.57 0.64 109 NCAATeamSeason 1.00 1.00 1.00 2668 NascarDriver 0.64 0.84 0.72 146 NationalCollegiateAthleticAssociationAthlete 0.00 0.00 0.00 23 NationalFootballLeagueSeason 0.96 0.97 0.96 560 Nerve 0.87 0.86 0.86 56 NetballPlayer 0.91 0.69 0.78 42 Newspaper 0.85 0.87 0.86 1019 Noble 0.60 0.48 0.53 799 Non-ProfitOrganisation 0.30 0.01 0.02 303 Novel 0.00 0.00 0.00 4 OfficeHolder 0.61 0.70 0.65 10451 OlympicEvent 0.98 0.97 0.98 726 OlympicResult 0.80 0.99 0.89 113 Olympics 0.75 1.00 0.86 6 Organisation 0.67 0.60 0.63 2759 Painter 0.68 0.35 0.46 402 Park 0.64 0.48 0.55 608 Person 0.59 0.67 0.63 28250 Philosopher 0.41 0.17 0.24 286 Photographer 0.75 0.04 0.08 73 Place 0.68 0.68 0.68 1071 Planet 0.98 0.95 0.96 537 Plant 0.97 0.96 0.96 8292 Play 0.75 0.62 0.68 288 PlayboyPlaymate 0.82 0.73 0.78 45 Poem 0.57 0.53 0.55 57 Poet 0.34 0.21 0.26 56 PokerPlayer 0.96 0.94 0.95 130 PoliticalParty 0.93 0.84 0.88 1178 Politician 0.75 0.25 0.38 2808 PoloLeague 0.00 0.00 0.00 5 Pope 0.94 0.88 0.91 68 PowerStation 0.83 0.95 0.89 326 Presenter 0.00 0.00 0.00 16 President 0.54 0.14 0.22 321 PrimeMinister 0.33 0.06 0.11 203 Prison 0.89 0.89 0.89 199 ProgrammingLanguage 0.73 0.55 0.63 148 ProtectedArea 0.80 0.85 0.82 1404 Protein 0.81 0.75 0.78 356 PublicTransitSystem 0.49 0.68 0.57 252 Publisher 0.81 0.43 0.56 250 RaceHorse 0.97 0.97 0.97 627 Racecourse 0.81 0.57 0.67 51 RacingDriver 0.74 0.73 0.74 388 RadioHost 0.17 0.32 0.22 56 RadioProgram 0.71 0.62 0.66 189 RadioStation 0.96 0.97 0.96 3086 RailwayLine 0.90 0.77 0.83 526 RailwayStation 0.93 0.60 0.73 235 RailwayTunnel 0.75 0.75 0.75 32 RecordLabel 0.88 0.85 0.86 506 Religious 0.43 0.14 0.21 169 ReligiousBuilding 0.59 0.67 0.62 675 Reptile 0.90 0.90 0.90 742 ResearchProject 0.00 0.00 0.00 2 Restaurant 0.79 0.63 0.70 175 River 0.96 0.98 0.97 4331 Road 0.95 0.98 0.96 3216 RoadJunction 0.86 0.64 0.73 28 RoadTunnel 0.65 0.84 0.73 43 Rocket 0.78 0.45 0.57 40 RollerCoaster 0.87 0.86 0.87 109 Rower 0.75 0.28 0.41 43 Royalty 0.71 0.67 0.69 1580 RugbyClub 0.85 0.89 0.87 366 RugbyLeague 0.77 0.65 0.70 62 RugbyPlayer 0.95 0.97 0.96 2539 Saint 0.75 0.72 0.73 602 School 0.91 0.96 0.93 4936 Scientist 0.51 0.53 0.52 3674 ScreenWriter 0.36 0.03 0.06 118 Sea 0.50 0.14 0.22 7 Senator 0.21 0.16 0.18 115 Settlement 0.88 0.91 0.90 37384 Ship 0.96 0.97 0.97 4584 ShoppingMall 0.86 0.89 0.88 381 Single 0.88 0.93 0.90 7687 SiteOfSpecialScientificInterest 0.79 0.88 0.83 170 Skater 0.65 0.80 0.72 80 SkiArea 0.85 0.70 0.77 92 Skier 0.77 0.84 0.81 413 Skyscraper 0.00 0.00 0.00 1 SnookerChamp 0.00 0.00 0.00 4 SnookerPlayer 0.83 0.95 0.89 61 SoapCharacter 0.85 0.84 0.85 418 SoccerClub 0.97 0.94 0.95 3233 SoccerClubSeason 0.94 0.99 0.96 1460 SoccerLeague 0.81 0.77 0.79 269 SoccerManager 0.82 0.64 0.72 2965 SoccerPlayer 0.93 0.97 0.95 17824 SoccerTournament 0.84 0.92 0.88 1079 SoftballLeague 0.00 0.00 0.00 2 Software 0.78 0.84 0.81 1716 SolarEclipse 0.98 0.98 0.98 61 Song 0.56 0.29 0.38 941 SpaceShuttle 0.00 0.00 0.00 2 SpaceStation 0.00 0.00 0.00 9 Species 0.79 0.81 0.80 940 SpeedwayLeague 0.00 0.00 0.00 3 SpeedwayRider 0.95 0.97 0.96 108 SpeedwayTeam 1.00 0.67 0.80 9 Sport 0.38 0.25 0.30 40 SportsEvent 0.84 0.80 0.82 172 SportsLeague 0.31 0.28 0.29 65 SportsTeam 0.63 0.69 0.66 377 SportsTeamMember 0.93 0.59 0.72 90 SquashPlayer 0.97 0.94 0.95 65 Stadium 0.62 0.30 0.40 932 Star 0.96 0.96 0.96 469 Station 0.95 0.99 0.97 4268 Stream 0.00 0.00 0.00 7 SumoWrestler 0.97 0.87 0.92 76 SupremeCourtOfTheUnitedStatesCase 0.97 0.97 0.97 437 Surname 0.14 0.01 0.02 74 Swimmer 0.88 0.82 0.85 919 TableTennisPlayer 0.82 0.68 0.74 75 TelevisionEpisode 0.93 0.92 0.92 1277 TelevisionHost 0.00 0.00 0.00 10 TelevisionSeason 0.94 0.88 0.91 569 TelevisionShow 0.86 0.83 0.84 5644 TelevisionStation 0.91 0.84 0.87 1163 TennisLeague 0.00 0.00 0.00 1 TennisPlayer 0.92 0.97 0.94 810 TennisTournament 0.92 0.94 0.93 188 Theatre 0.30 0.24 0.27 115 Town 0.83 0.71 0.76 6528 TradeUnion 0.89 0.73 0.81 248 Train 0.91 0.76 0.83 237 Tunnel 0.00 0.00 0.00 15 University 0.88 0.86 0.87 2900 Valley 0.14 0.07 0.09 15 Vein 0.92 0.94 0.93 35 Venue 0.41 0.67 0.51 889 VideoGame 0.90 0.93 0.92 3038 Village 0.96 0.95 0.95 26308 VoiceActor 0.00 0.00 0.00 28 Volcano 0.68 0.51 0.58 106 VolleyballCoach 0.08 0.12 0.10 8 VolleyballLeague 0.71 0.38 0.50 13 VolleyballPlayer 0.94 0.89 0.91 601 WaterRide 0.00 0.00 0.00 10 WaterwayTunnel 1.00 0.50 0.67 2 Weapon 0.90 0.78 0.84 814 Website 0.73 0.29 0.42 548 WineRegion 0.94 0.77 0.85 65 Winery 0.82 0.73 0.77 51 WomensTennisAssociationTournament 0.91 0.93 0.92 88 WorldHeritageSite 0.57 0.07 0.13 107 Wrestler 0.89 0.73 0.80 524 WrestlingEvent 0.95 0.91 0.93 173 Writer 0.50 0.33 0.40 4675 WrittenWork 0.66 0.81 0.73 235 Year 0.99 0.97 0.98 247 YearInSpaceflight 1.00 0.86 0.92 7 owl#Thing 0.52 0.56 0.54 42119 micro avg 0.81 0.81 0.81 500412 macro avg 0.69 0.61 0.64 500412 weighted avg 0.81 0.81 0.81 500412

- 投稿日:2019-04-17T00:34:21+09:00
kubernetesでPython+MySQL8を使う時にハマった点!
概要
現在、ローカルにvue+djangoの開発環境をkubernetesで構築しようとしているのですが、
mysqlのコンテナを立てる際にハマったことがあったので、情報を共有します。MySQL8をPythonで使う場合について
MySQLをPythonで使う場合、パッケージに
mysqlclientを選択することがあると思います。ここでMySQL8で
mysqlclientを使う場合に注意する点があります。
MySQL8.0.4以降、デフォルトの認証方式が変更され、mysql_native_passwordからcaching_sha2_passwordになりました。しかし、mysqlclientはこのcaching_sha2_passwordに対応していません。
そのため、以下のように、my.cnfを変更するか、もしくはmysqldの実行時に--default-authentication-plugin=mysql_native_passwordオプションをつけて、認証方式をmysql_native_passwordに戻す必要があります。my.cnf[mysqld] default-authentication-plugin = mysql_native_passwordmysqld --default-authentication-plugin=mysql_native_passwordkubernetesでMySQLをデプロイ
私は、docker-composeにてMySQL8系のコンテナを利用していたこともあり、その際にdocker-compose.ymlからコマンドを上書きして、後者のコマンドにオプションをつけて実行する方法で実行していたため、kubernetesでの実行時も同様の方法を選択しました。
一部抜粋した設定定義ファイルでは以下のように指定していました。
注:ここではローカル環境用の設定定義のため、パスワード等をConfigMapで設定していますが、実際の運用ではSecretを推奨です
mysql-sts.yaml... spec: containers: - name: mysql image: mysql:8.0.15 # この部分 command: - mysqld - --user=root --default-authentication-plugin=mysql_native_password env: - name: MYSQL_USER valueFrom: configMapKeyRef: name: mysql-cm key: MYSQL_USER - name: MYSQL_PASSWORD valueFrom: configMapKeyRef: name: mysql-cm key: MYSQL_PASSWORD - name: MYSQL_DATABASE valueFrom: configMapKeyRef: name: mysql-cm key: MYSQL_DATABASE ports: - containerPort: 3306 name: mysql volumeMounts: - name: data mountPath: /var/lib/mysql subPath: mysql ...しかし、これを用いてリソースを作成するとなぜか初期化の段階でうまくいきません。
これはkubernetesのcommandの仕様が、少し特殊だったことが原因でした。kubernetesのcommandとENTRYPOINT
結論から言いますと、kubernetesのcommandは
CMDだけではなく、ENTRYPOINTも上書きしてしまうことが問題点となっていました。
kubernetes学習番外編 コンテナ起動時のコマンド実行 - そんな今日この頃の技術ネタこのリソースでは公式のMySQLイメージを利用していますが、公式イメージはイメージ内でENTRYPOINTを利用して初期化をするスクリプトが走っています。
そのため、上記のようにkubernetesのcommandを利用してしまうと、ENTRYPOINTが上書きされてしまい、公式イメージによって自動化されていた初期化のプロセスを実行しなくてはいけないんですが、それをうまく実行できていなかったために、エラーとなっていたようです。そのため、以下のようにmy.cnfを変更する方法で、認証方式を
mysql_native_passwordに戻すことで、エラーを回避することができました。mysql-sts.yamlapiVersion: v1 kind: ConfigMap metadata: name: django-mysql-cm labels: project: django-vue app: mysql data: MYSQL_USER: timer MYSQL_PASSWORD: timer MYSQL_DATABASE: timer MYSQL_HOST: django-mysql-svc my.cnf: |- [mysqld] default-authentication-plugin = mysql_native_password --- ... containers: - name: mysql image: mysql:8.0.15 env: - name: MYSQL_USER valueFrom: configMapKeyRef: name: django-mysql-cm key: MYSQL_USER - name: MYSQL_PASSWORD valueFrom: configMapKeyRef: name: django-mysql-cm key: MYSQL_PASSWORD - name: MYSQL_DATABASE valueFrom: configMapKeyRef: name: django-mysql-cm key: MYSQL_DATABASE ports: - containerPort: 3306 name: mysql volumeMounts: - name: my-cnf mountPath: /etc/my.cnf subPath: my.cnf readOnly: true - name: data mountPath: /var/lib/mysql subPath: mysql volumes: - name: my-cnf configMap: name: django-mysql-cm items: - key: my.cnf path: my.cnf ...あとがき
今回は思ってもみなかったkubernetesの仕様でかなりの時間対応させられることになってしまいました。
初期化で失敗している時点で、公式イメージの初期化処理が通ってないと気づくのが、もう少し早かったならばと悔やまれます。現在まだ環境を構築中ですが、開発環境が完成したら、後日公開したいなと思っています。
- 投稿日:2019-04-17T00:25:57+09:00
TensorFlow2.0でアニメキャラ識別
TensorFrowのチュートリアルを
パクって参考にしてアニメキャラ識別をしてみました。
解説はチュートリアルに書いてあるのでそちらを見てください。環境
- Windows10 (64bit)
- Python 3.6.8
- TensorFrow 2.0.0-alpha0
以下のようなフォルダ階層となっている前提で話を進めます。
. ├─mk_DataSet.py ├─Training.py ├─Classifier.py ├─Labels.tsv └─Anime_Title ├─Chara1 │ └─大量の画像データ ├─Chara2 │ └─大量の画像データ ├─Chara3 │ └─大量の画像データ学習データ集め
まずは学習用のデータを集めます。使うのはこれ↓だと思いますが、先人たちがいろいろ書いてくれてますので今回は割愛します。
OpenCVによるアニメ顔検出ならlbpcascade_animeface.xml集めたデータはキャラクターごとに分けてください。
それに合わせてLabels.tsvファイルを作成します。タブ区切りで「id,キャラ名(フォルダ名),イメージカラー」
Labels.tsv0 Lala (255, 127, 255) 1 Mirei (255, 127, 127) 2 Sophy (255, 0, 255) 3 Sion (0, 255, 0) 4 Dorothy (255, 0, 0) 5 Reona (0, 0, 255)データセット作成
学習用とテスト用データセットをつくる。
train.tsvとtest.tsvができます。mk_DataSet.pyimport os import glob import numpy as np imdir = 'PriPara' idx, labels, col = np.loadtxt('Labels.tsv', delimiter='\t', dtype='i8,S20,S20', unpack=True) data = [] for i,name in zip(idx,labels): lst = glob.glob(os.path.join(imdir, name.decode(), '*.png')) print('%s: %d'%(name.decode(), len(lst))) for fn in lst: data.append([i, fn]) np.random.shuffle(data) tt = int(len(data)*0.75) np.savetxt('train.tsv', data[:tt], fmt='%s', delimiter='\t') np.savetxt('test.tsv', data[tt:], fmt='%s', delimiter='\t')学習する
チュートリアルではグレースケール画像ですが,アニメキャラは髪の色で判別してる説があるのでカラー画像で学習します。
画像を読み込むときにいろいろ処理していますが,それっぽいことをしているだけで効果があるかは確認していません。Training.pyimport tensorflow as tf from tensorflow import keras import numpy as np import cv2 import matplotlib.pyplot as plt idx, labels, col = np.loadtxt('Labels.tsv', delimiter='\t', dtype='i8,S20,S20', unpack=True) IMG_SHAPE = (50, 64, 3) def img(fn): img = cv2.imread(fn) # サイズ調整 img = cv2.resize(img, (np.max(IMG_SHAPE),np.max(IMG_SHAPE))) img = img[:IMG_SHAPE[0],:IMG_SHAPE[1],:] # ガウシアンフィルタで平滑化 img = cv2.GaussianBlur(img, (3,3), 1) # 輝度のみ平坦化 img = cv2.cvtColor(img, cv2.COLOR_BGR2YUV) img[:,:,0] = cv2.equalizeHist(img[:,:,0]) img = cv2.cvtColor(img, cv2.COLOR_YUV2BGR) return img def mk_data(fn): print('Loading...', fn) labels, lst = np.loadtxt(fn, delimiter='\t', dtype='i8,S50', unpack=True) images = np.stack([img(fn.decode()) for fn in lst]) images = images / 255.0 return labels, images try: data = np.load('train.npz') train_labels = data['lbl'] train_images = data['img'] data = np.load('test.npz') test_labels = data['lbl'] test_images = data['img'] ans = input('Use save data? [Y/n] ') if ans in ['N','n','No','no']: raise Exception except: train_labels, train_images = mk_data('train.tsv') test_labels, test_images = mk_data('test.tsv') np.savez('train.npz', lbl=train_labels, img=train_images) np.savez( 'test.npz', lbl=test_labels, img=test_images) ## モデルの構築 # layerの設定 model = keras.Sequential([ keras.layers.Flatten(input_shape=IMG_SHAPE), keras.layers.Dense(256, activation=tf.nn.relu), keras.layers.Dense(np.max(idx)+1, activation=tf.nn.softmax) ]) # モデルのコンパイル model.compile(optimizer=tf.keras.optimizers.Adam(), loss='sparse_categorical_crossentropy', metrics=['accuracy']) ## モデルの訓練 model.fit(train_images, train_labels, epochs=20) ## 正解率の評価 test_loss, test_acc = model.evaluate(test_images, test_labels) print('Test accuracy:', test_acc) model.save('my_model.h5') ## 予測する predictions = model.predict(test_images) def plot_image(i, predictions_array, true_label, img): predictions_array, true_label, img = predictions_array[i], true_label[i], img[i] plt.grid(False) plt.xticks([]) plt.yticks([]) plt.imshow(img, cmap=plt.cm.binary_r) predicted_label = np.argmax(predictions_array) color = 'blue' if predicted_label == true_label else 'red' plt.xlabel("{} {:2.0f}% ({})".format(labels[predicted_label].decode(), 100*np.max(predictions_array), labels[true_label].decode()), color=color) def plot_value_array(i, predictions_array, true_label): predictions_array, true_label = predictions_array[i], true_label[i] plt.grid(False) plt.xticks([]) plt.yticks([]) thisplot = plt.bar(range(np.max(idx)+1), predictions_array, color="#777777") plt.ylim([0, 1]) predicted_label = np.argmax(predictions_array) thisplot[predicted_label].set_color('red') thisplot[true_label].set_color('blue') num_rows = 5 num_cols = 3 num_images = num_rows * num_cols plt.figure(figsize=(2*2*num_cols, 2*num_rows)) for i in range(num_images): plt.subplot(num_rows, 2*num_cols, 2*i+1) plot_image(i, predictions, test_labels, test_images) plt.subplot(num_rows, 2*num_cols, 2*i+2) plot_value_array(i, predictions, test_labels) plt.show()精度は95%程度はでる。
最後に学習結果の例が出る。Matplotlibで表示されるのでRとBが逆だけど気にしない。
識別する
スクショをとって識別してみます。
model = keras.models.load_model('my_model.h5')で保存したモデルごと読み込むだけで使える。Classifier.pyimport tensorflow as tf from tensorflow import keras import numpy as np import cv2 from PIL import ImageGrab idx, labels, cols = np.loadtxt('Labels.tsv', delimiter='\t', dtype='i8,S20,S20', unpack=True) IMG_SHAPE = (100, 128, 3) model = keras.models.load_model('my_model.h5') print(model.summary()) path = 'C:\\_data_\\lbpcascade_animeface.xml' cascade = cv2.CascadeClassifier(path) def predict(img): cv2.cvtColor(img, cv2.COLOR_BGR2RGB) img = cv2.resize(img, (np.max(IMG_SHAPE),np.max(IMG_SHAPE))) img = img[:IMG_SHAPE[0],:IMG_SHAPE[1],:] predictions = model.predict(np.expand_dims(img,0)) return np.argmax(predictions[0]), np.max(predictions[0]) cv2.namedWindow('ret', cv2.WINDOW_NORMAL) while cv2.waitKey(1)!=27: img = ImageGrab.grab(bbox=(50, 100, 1600, 1200)) img = np.asarray(img) img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR) gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) gray = cv2.equalizeHist(gray) faces = cascade.detectMultiScale(gray, minSize=(200,200), scaleFactor=1.05, minNeighbors=5) for (x,y,w,h) in faces: face = img[y:y+h, x:x+w] idx, val = predict(face) label = labels[idx].decode() col = tuple(map(int, cols[idx][1:-1].decode().split(','))) cv2.rectangle(img, (x,y), (x+w,y+h), col, 2) cv2.putText(img, '%s:%.3f'%(label,val), (x,y), cv2.FONT_HERSHEY_SIMPLEX, 1.0, col, 2) cv2.imshow('ret', img)結果